ヘルプ

-

自動化プロジェクトの最初のステップは、目的を明確に定義することです。つまり、どのようなプロセスを実現しようとしているのか、あるいはどのような出力を生成しようとしているのかを明確にすることです。プロセスまたは出力が定義されたら、アプリケーションの詳細を掘り下げて、適切なコンポーネントを選択する必要があります。
続きを読む -
デカルト座標幾何学は、3次元空間をシンプルで理解しやすい数値システムで表現する優れた方法です。3次元空間のデカルト座標系では、互いに垂直な3つの座標軸(直交軸)があり、それらは…で交わります。
続きを読む -

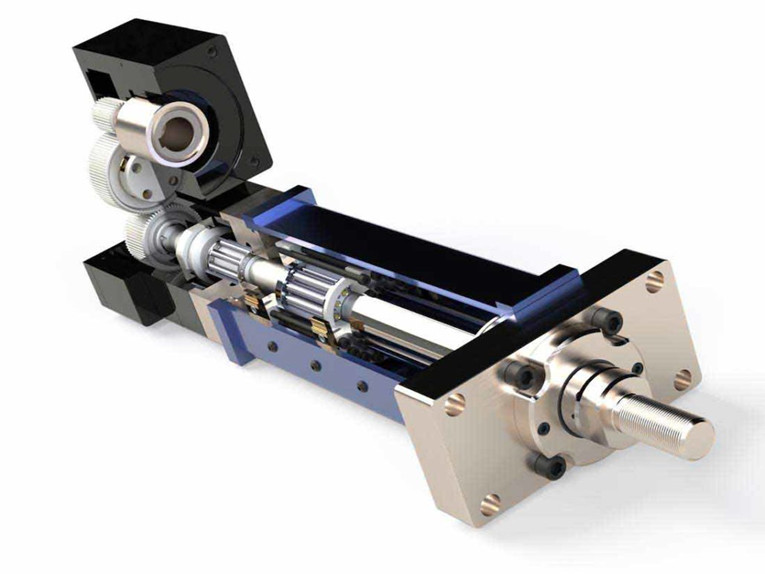
リニアアクチュエータは、一般的に駆動機構(ベルト駆動、ボールまたはリードスクリュー駆動、空気圧駆動など)によって分類されます。しかし、ロッド型電動アクチュエータの場合、内蔵モーターの入力電圧(一般的には12Vまたは24V)によって分類されることも珍しくありません。これらのアクチュエータは…
続きを読む -

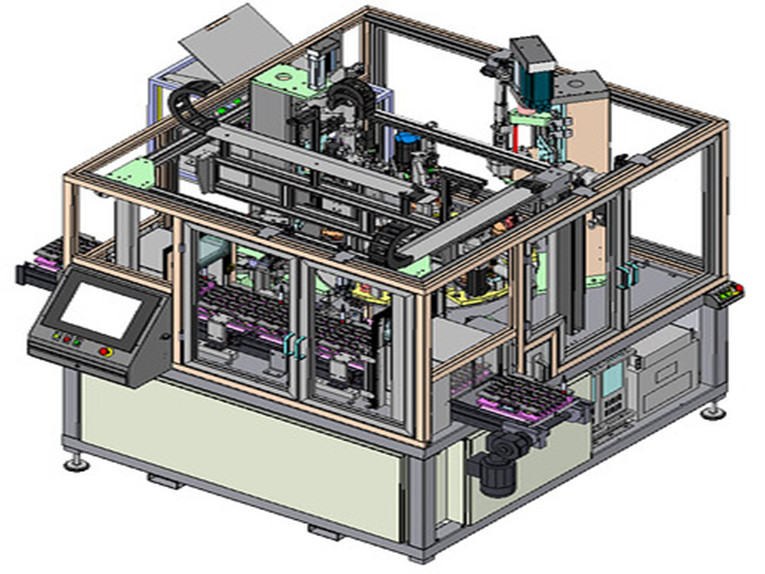
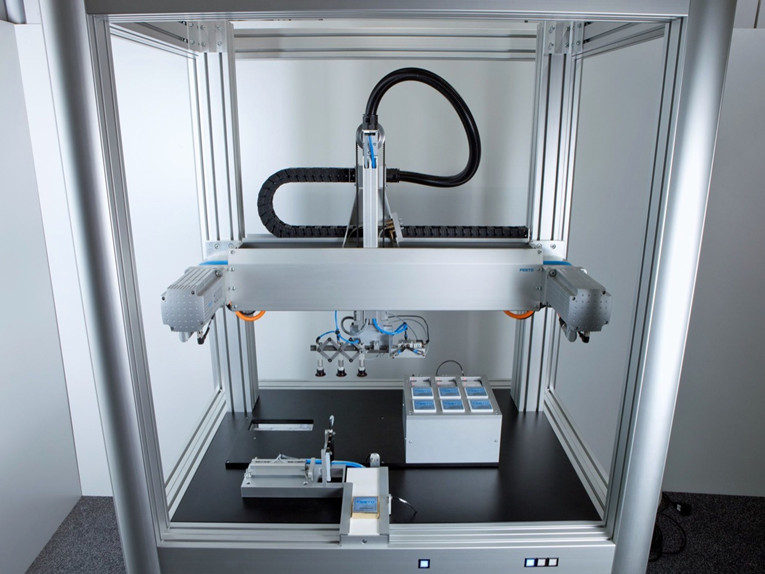
製造業における自動化の需要は増加の一途をたどっており、加工、組み立て、検査から包装まで、ほぼすべての用途に適用可能です。ガントリーや6軸産業用ロボットは、パレタイジング、仕分け、梱包などの用途における自動化を実現するために広く使用されています。
続きを読む -

子供の頃、ほとんどの人が、おもちゃを拾って元の場所に戻して整理整頓してくれるロボットがいたらいいのに、と願ったことがあるのではないでしょうか?そうすれば、散らかしたことを親に叱られることもなくなるのに、と。今日、それは現実のものとなりました。ロボットはまだ家の中で物を拾って元の場所に戻すことはできませんが、すでに…
続きを読む -
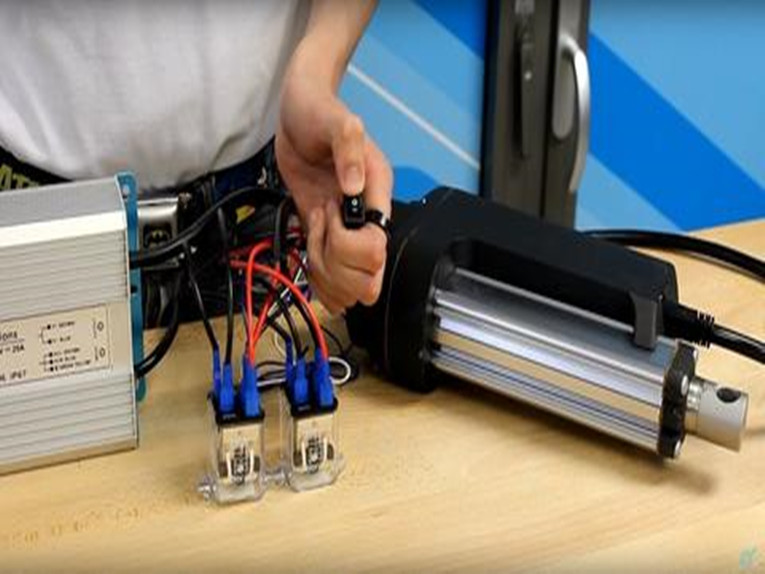
リニアアクチュエータは、中央制御信号を使用して円運動を直線方向に移動または制御するために使用される装置です。制御信号は、モーターがあらゆる機構を直線的に前後に動かすのに役立ちます。引張および押圧動作により、この装置は複数の機能を実行できます。
続きを読む -
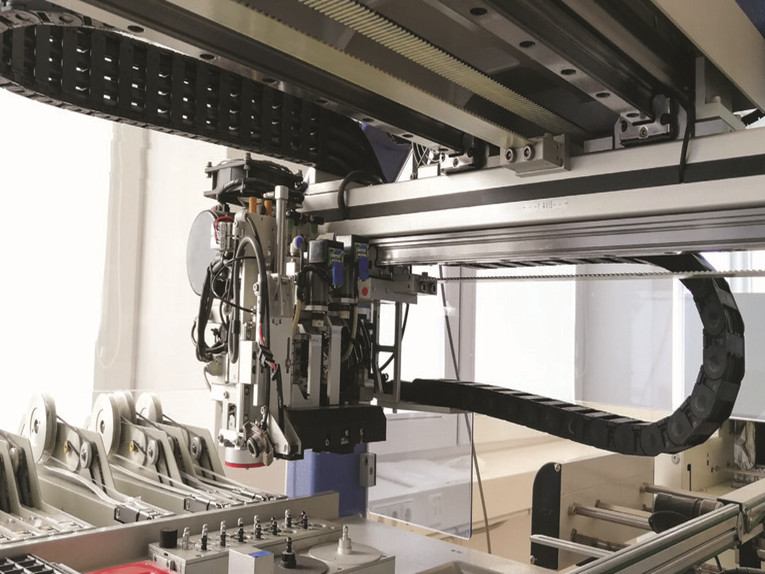
直線運動システムの設計に関するいくつかの簡単なガイドラインに従うことで、システム性能とアクチュエータ寿命を向上させることができます。多くの自動機械は、可動部品をガイドおよび支持するために、プロファイルレール、丸レール、その他の転がり軸受または滑り軸受構造などの直線ガイドコンポーネントに依存しています。
続きを読む -
リニアアクチュエータは、医療用ベッド、手術台、歯科用チェアなど、さまざまな医療機器に重要な機能を提供します。リニアアクチュエータは、エネルギーを変換して直線運動を生み出し、必要に応じて機械脚を持ち上げたり、傾けたり、出し入れしたりする機械装置です。
続きを読む -

病院や医療施設で患者を移動させる場合、必ずしも車椅子やストレッチャーに乗せた患者を廊下を駆け抜ける必要はありません。多くの場合、患者は単に横になったり座ったりした状態から立ったり(またはその逆)するだけです。たとえ重度の障害を持つ患者であっても、
続きを読む -
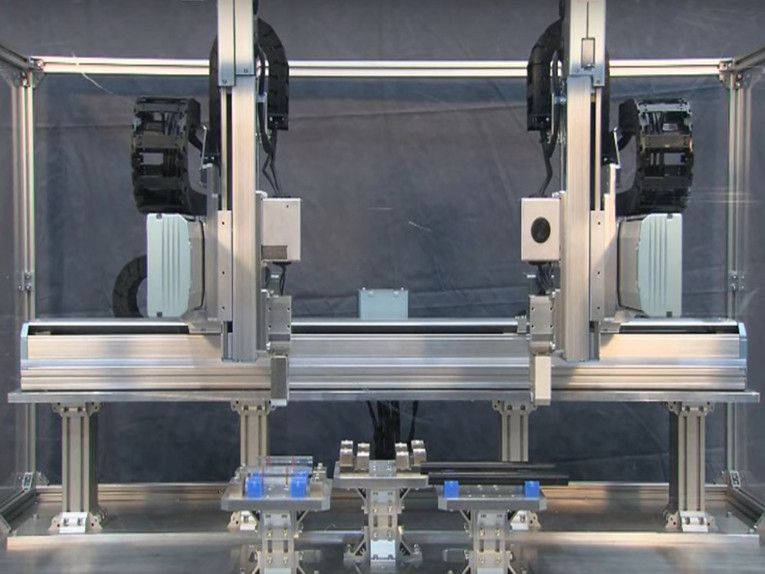
直交座標ロボットとは?直交座標系で動作する機械は、数十年にわたり工場で欠かせない存在となっています。3Dプリンター、レーザーカッター、CNCマシンなどは、直交座標ロボットと同じ原理を使用する装置の例です。これらのロボットが他のロボットと異なる点は、その制御性です。
続きを読む -
性能と価格帯が幅広いロボットは、あらゆる種類の産業生産現場で普及しつつあります。各ロボットタイプの能力を理解することが、自社にとって最適な選択をする鍵となります。半世紀にわたり、大型の6軸ロボットのイメージは…
続きを読む -

他のタイプのロボットや多軸システムとは対照的に、まず、直交座標系は、直交座標に従って3つの直交軸(X、Y、Z)に沿って移動するシステムです。(ただし、エンドエフェクタやアーム先端ツールなどの回転軸が、場合によっては…
続きを読む







