ヘルプ

-

典型的な汚染環境をここに示します。作業環境が破片でひどく汚染されている場合、または広い温度範囲やその他の環境要因などの極端な条件が含まれている場合、信頼性の高い動作を得ることはしばしば困難です。このような作業に機械を使用することは、...
続きを読む -
ねじの直径、長さ、またはエンドベアリングの配置。リニアモーション業界で使用される多くの用語(「ヘビーデューティー」、「ミニチュア」、「耐腐食性」など)と同様に、「高速」リニアアクチュエータを構成するものを規定する業界標準はありません。しかしながら、いくつかの...
続きを読む -
U字型リニアアクチュエータは、押し出し成形された鋼製ベースで構成されています。リニアアクチュエータとリニアステージを定義する業界標準はありませんが、一般的に受け入れられている用語では、リニアアクチュエータは通常、アルミニウムの押し出し成形またはベースで構成され、一方、...
続きを読む -

同期ベルトの適切な張力とは、駆動システムが全負荷状態になったときに、ベルトがラチェットを起こすことなく必要な動力を伝達できる張力のことです。同期ベルト(歯付きベルト、コグドベルト、タイミングベルト、高トルクベルトとも呼ばれます)は、プーリーとかみ合うプロファイルされた歯を使用します。
続きを読む -
構造、コンポーネント、電子配線、保守性。機械工学、電気工学、プログラミング、制御工学を統合するのは容易ではありません。しかし、技術の進歩を取り入れ、これら5つの分野に焦点を当てることで、プロセスを簡素化し、メカトロニクスを容易にすることができます。
続きを読む -

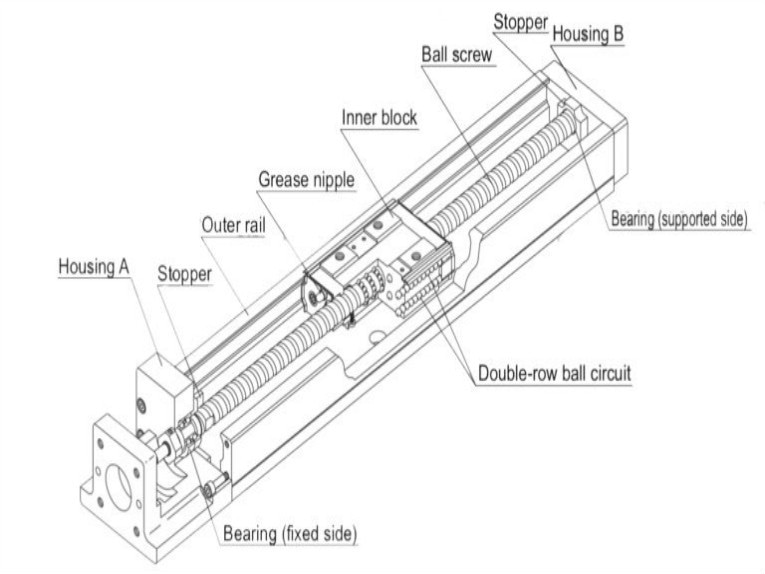
特にFDAやUSDAの規制に準拠する必要がある用途では、ボールとローラーの循環ガイドは、高い動作精度、優れた剛性、優れた耐荷重性といった特性により、多くの自動化プロセスや機械の基盤となっています。これらの特性は、高機能素材の使用によって実現されています。
続きを読む -
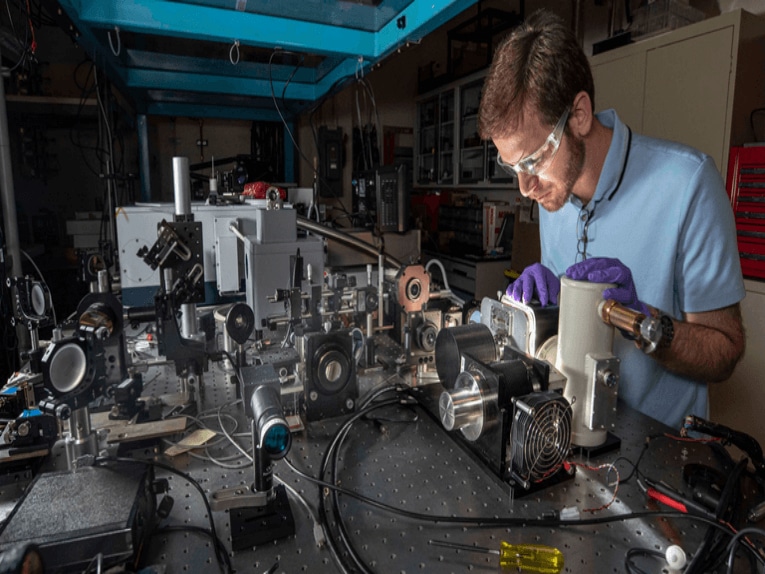
モーションシステム設計の典型的な構成 直線運動は多くの移動機械の中心であり、リニアモーターの直接駆動方式は、これらの用途における機械全体の設計を簡素化できます。その他の利点としては、リニアモーターが負荷に直接固定されるため、剛性が向上することが挙げられます。
続きを読む -
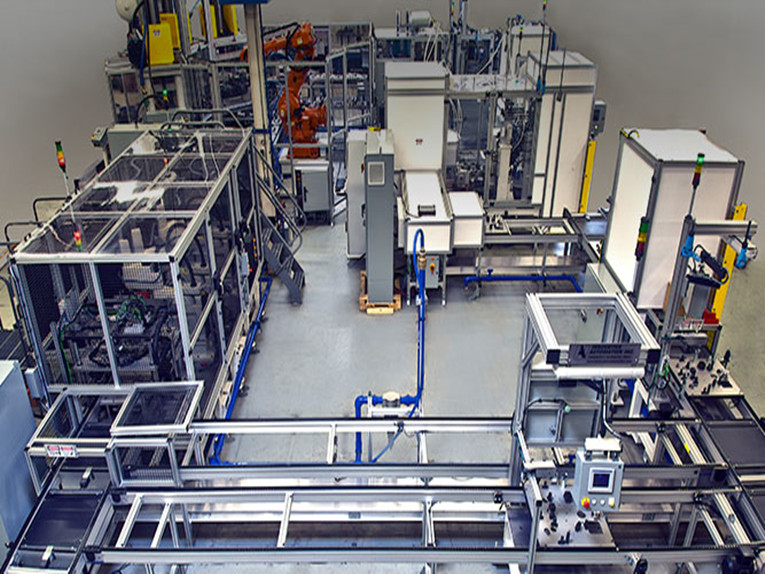
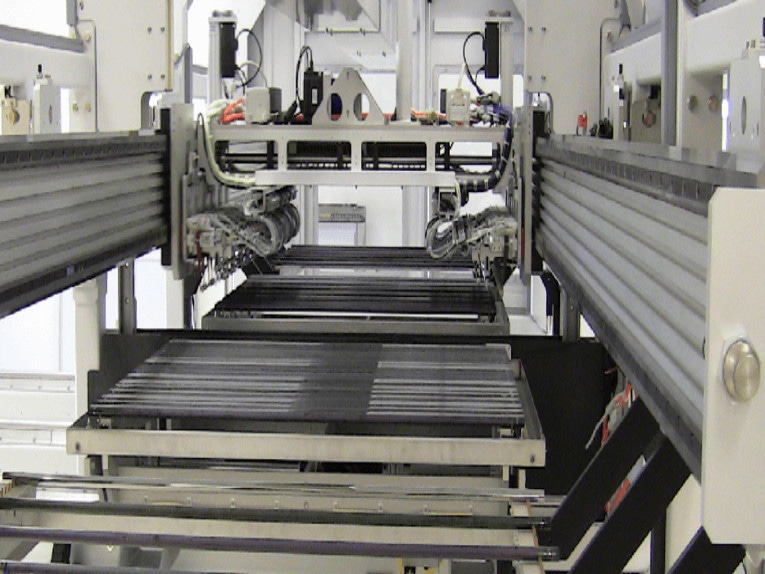
生産ラインから高精度と再現性を得る つい最近まで、生産ラインから高精度と再現性を得ることは困難でした。しかし現在、自動化のための新しいシステムにより、高品質製品の手作業による取り扱いと組み立てに伴う障壁が取り除かれつつあります。ここでは、...
続きを読む -
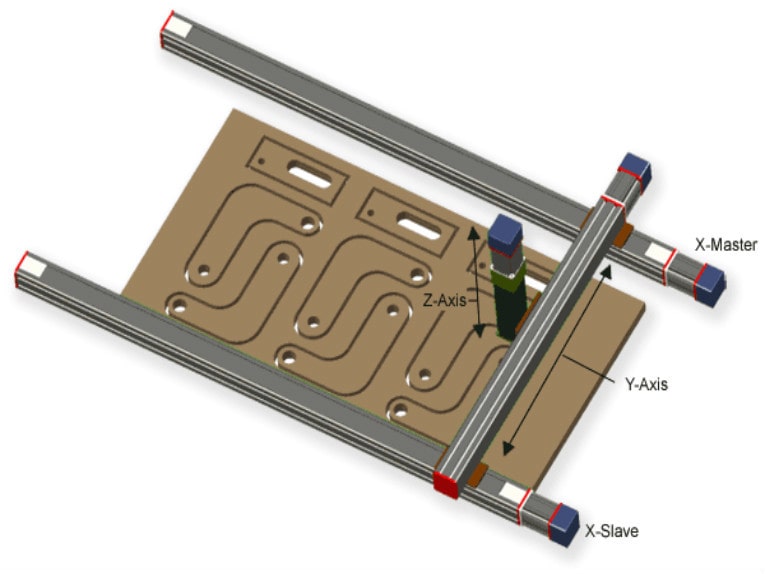
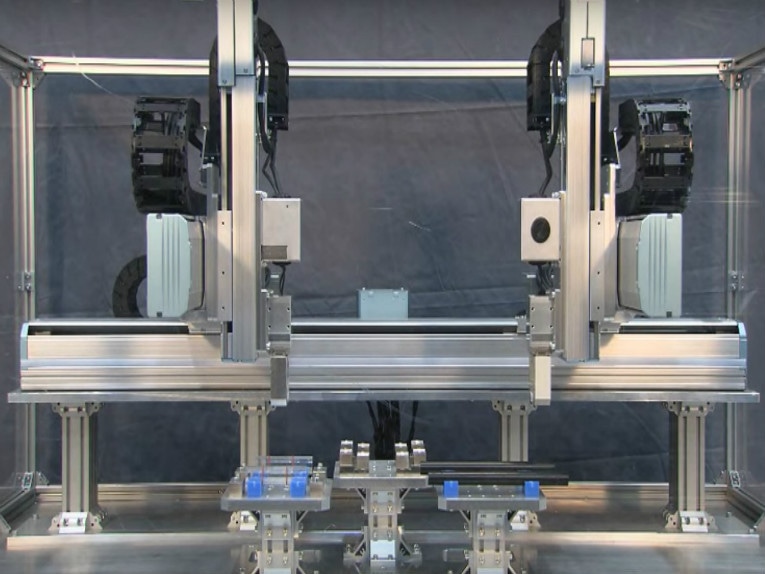
そして、それをどのように回避できるのか… ガントリーは、他のタイプの多軸システム(直交ロボットやXYテーブルなど)とは異なり、2つのベース(X)軸を平行に配置し、それらを垂直な(Y)軸で接続します。この2つのX軸配置により、広くて安定した設置面積が得られ、…
続きを読む -
静音性は、より速く、より長い寿命を意味します。同期ベルトはモーションシステムで一般的であり、チェーンよりもスムーズな動作と優れた高速性能を提供し、精密用途でVベルトを悩ませる滑りや伸びの問題がありません。しかし、同期ベルトの欠点の1つは...
続きを読む -

ベアリングの故障原因を防ごう。リニアベアリングが早期に故障することは誰も望んでいません。ベアリングの寿命を脅かす要因は数多くありますが、産業機械の設計者は特にベアリングレールと可動要素間のアライメント誤差に注意する必要があります。アライメント誤差は、ベアリングの寿命を縮めるだけでなく、ベアリングの寿命を縮める原因にもなります。
続きを読む -

メインドライブ メインドライブは主に、閉ループ制御の電気同期モーターと非同期モーターです。その用途には、旋盤、フライス盤、研削盤、およびマシニングセンターで使用されるキットモーターまたはハウジング付きモーターが含まれます。ハウジング付きモーターを使用した従来のスピンドルドライブは、...
続きを読む







