







-

推力1800N、位置精度0.2mmの電動リニアアクチュエータ
DCモーター静音設計により、パター動作時の騒音問題を解決します。金属ギア粉末冶金、純金属ギア、超高強度、2倍の靭性。上下リミットスイッチ伸縮ロッドは、上端または下端に達すると自動的に停止し、...続きを読む -
表面処理機器を良好な状態に保つための5つのヒント
産業機械の保守、責任、選定について知っておくべきことは以下のとおりです。第二次世界大戦前は、機械は基本的なもので、かさばり、動作も遅かった。生産需要が低かったため、機械の停止は大きな問題にはなりませんでした。しかし、技術の進歩に伴い…続きを読む -
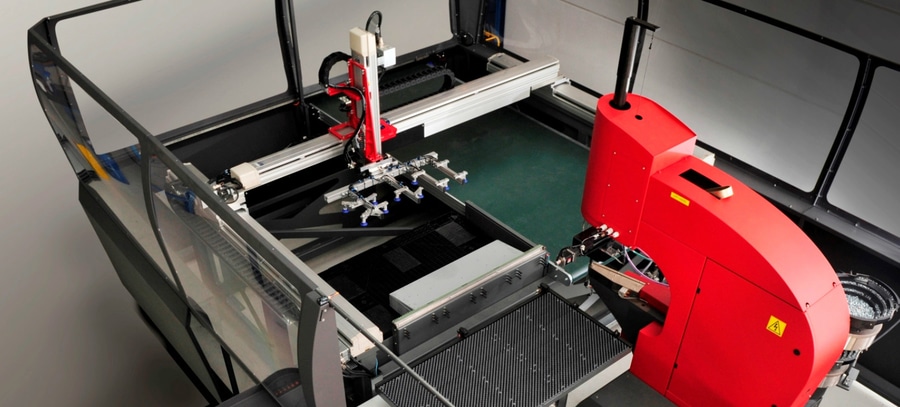
ピックアンドプレースマシンを使用する10のメリット
生産性と製品品質の向上への道は、多くの場合、ピックアンドプレース自動化から始まります。ピックアンドプレースマシンは現代の製造環境に不可欠な要素となり、問題を解決し、最終的に企業の収益を向上させるためのカスタマイズ可能な方法を提供します。以下に…続きを読む -
リニアガイドが高温での使用に適している条件とは?
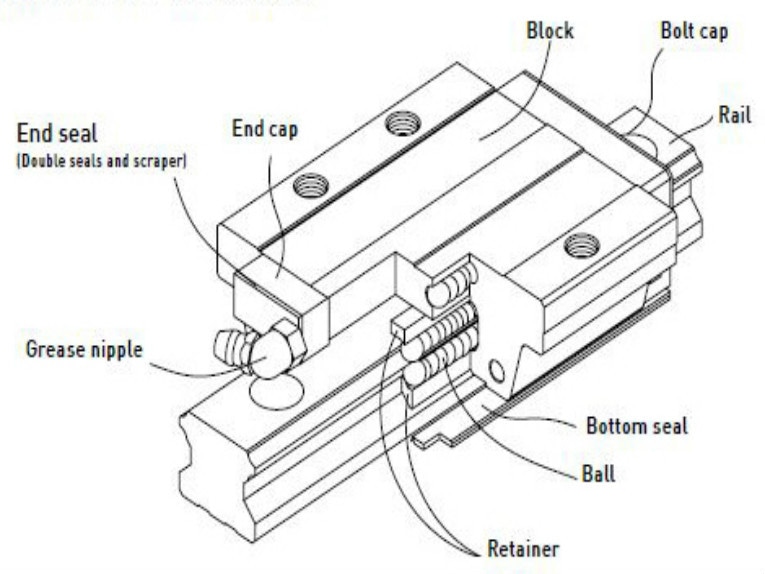
金属部品、プラスチック部品、潤滑剤、オプション部品および付属品。ほとんどの循環式ボールアンドローラーリニアガイドの許容動作温度範囲は-10℃~80℃で、一部の構成では短時間であれば100℃まで対応可能です。ただし、すべての用途がこの範囲に収まるわけではありません。続きを読む -
リニアガイドにおけるスティクション(スティックスリップ)の影響を軽減する方法
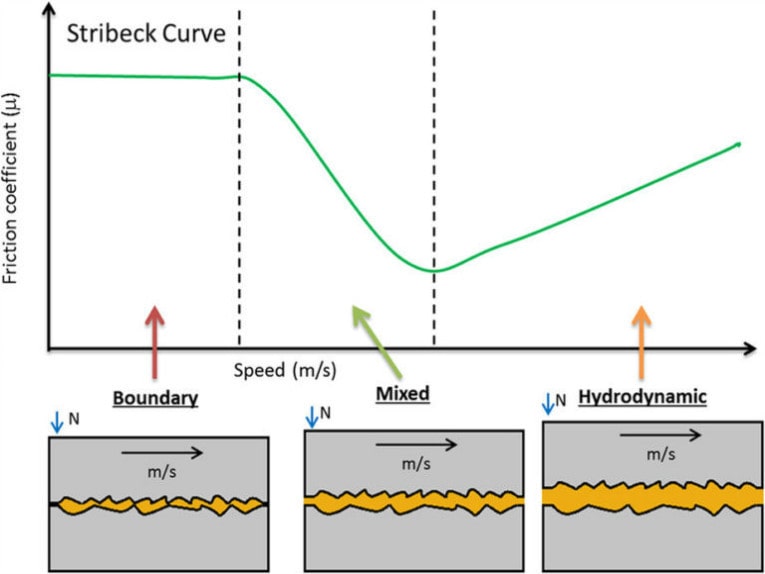
スティクションの原因は?その軽減方法。バイオリンを演奏するのでなければ、スティクション(またはスティックスリップ)とは、2つの表面間の静止摩擦と動摩擦の差によって引き起こされる望ましくない現象です。リニアガイドでスティクションが発生すると、チャタリング(「ぎくしゃくした」動き)や…続きを読む -
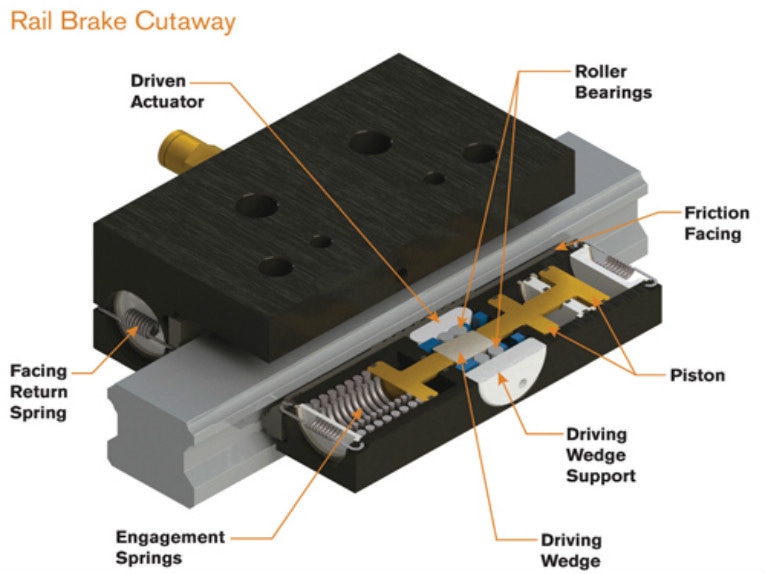
レールブレーキとは何か、そしていつ使用すべきか?
レールブレーキの選択と適用方法 リニアモーションシステムを駆動するサーボモーターやステッピングモーターには、多くの場合、ブレーキ機能、またはステッピングモーターの場合は、電源オフ時にモーター(したがって負荷)が動かないようにするデテントトルクが備わっています。しかし、一部のアプリケーションでは、...続きを読む -

同期ベルト駆動用プーリーの選定方法
高速かつ高精度なベルト駆動システムの設計。ベルト駆動システムを設計する際、最初のステップは用途に最適なベルトを選択することです。しかし、プーリーもベルトの性能に重要な役割を果たします。特に同期ベルト駆動システムでは、適切なプーリーの選択が不可欠です。続きを読む -
線形精度限界への挑戦
直線で正確な動きは決して容易ではありません。直線で正確な動きは決して容易ではなく、リニアポジショニングデバイスは、1次元だけでなく3次元で誤差を生じさせることでそれを証明しています。直線運動の概念を完全に理解したと思った矢先、直線上の必要なポイントに到達し、そして...続きを読む -

モーターとスクリューを一体化した設計にはどのような選択肢がありますか?
外部モーター・スクリュー統合、非固定モーター・スクリュー統合、固定モーター・スクリュー統合 ボールねじおよびリードスクリューアセンブリは、多くの場合、カップリングを介してスクリューシャフトと直列に接続されたモーターによって駆動されます。この取り付け方法はシンプルでメンテナンスも容易ですが、追加...続きを読む -
直交座標ロボットの設計における3つの重要な考慮事項
システム構成、ケーブル管理、制御。アプリケーションで直交ロボットが必要な場合、統合レベルに応じてさまざまなオプションがあります。また、製造業者が事業を拡大するにつれて、プレエンジニアリングされた直交ロボットが広く採用されるようになっています。続きを読む -
リニアガイド、動力伝達装置、アクチュエーター 意外な用途をご覧ください
より高い精度と容易な設置。2020年の業界調査によると、これまで静的または手動で操作されていたシステムの自動化への傾向は衰えることなく続いています。これらの新製品の鍵となるのは、リニア軸用リニアコンポーネントのOEMおよびエンドユーザーにとっての設置の容易さです…さらに…続きを読む -
リニアポジショニングステージとXYZテーブル
ピックアンドプレース用途向け直交ロボット。位置決めステージとテーブルは、モーションコントロールシステムにおいて、ワークピースを固定したり、何らかの作業のために位置決めしたりするために使用されます。ステージやテーブルは、直線型であれ回転型であれ、ほとんどの場合、完全なモーションサブシステムです。つまり、それらはモーションシステムです。続きを読む
