







-

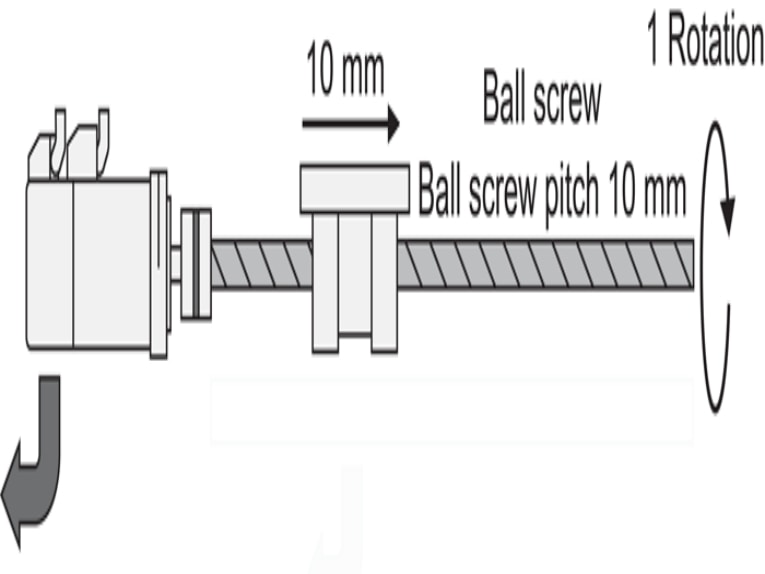
直線運動のより精密な制御
高精度な自動位置決めには、ステッピングモーターを用いたリニアアクチュエータが適しています。リニアアクチュエータは、基本的に直線に沿って力と動きを生み出します。一般的な機械システムでは、装置の出力軸は、ギア、ベルト、プーリーを介して回転モーターによって直線運動を実現します。続きを読む -

サーボモーターとステッピングモーター、どちらが最適か?
クローズドループステッピングモーターは、従来型のステッピングモーターでは対応できなかった、サーボモーターが通常行うタスクに最適な選択肢となる可能性があります。あらゆる種類のモーションコントロールプロセスを設計する際に、エンジニアが下す最も重要な決定の1つは、モーターの選択です。適切なモーターを選ぶことは、...続きを読む -
高精度リニアモジュールを選定するための5つの重要な要素
すぐに設置できるリニアモジュールは、さまざまな業界で、多種多様な機械において材料、製品、生産治具を搬送するために使用されています。機械設計者は、特定の生産要件や性能要件に基づいて、リニアモジュールを選択する際に複数の選択肢から選ぶことができます。続きを読む -

優れた機械設計のための土台作り
どんなに高度なモーションコントローラであっても、設計の不十分な電気機械システムを克服することはできません。モーション制御システムは、位置決め機構、モータ駆動エレクトロニクス、モーションコントローラの3つの主要コンポーネントで構成されています。これらの各コンポーネントは、慎重に設計する必要があります。続きを読む -
直線運動システムの設計方法
リニアシステムを設計する際は、支持部、ガイド、駆動部、シールなどを考慮してください。リニアシステムの設計を開始する前に、精度、再現性、負荷、環境要件を把握しておきましょう。低摩擦・高剛性のボールガイドは、1本のレール(上)または2本のレール(下)で支持します。これらの利点と欠点は、…続きを読む -
電動リニアアクチュエータ:自作か購入か?
電動リニアアクチュエータシステムを自社で設計することは、多くの場合、自動化されたモーションソリューションを実現する上で最もコスト効率と時間効率の良い方法です。しかし、場合によっては購入した方が良いこともあります。電動リニアアクチュエータのニーズを、あなた自身以上に正確に理解している人はいないでしょう。そして今日では、すぐに使える既製の製品が数多く販売されています。続きを読む -
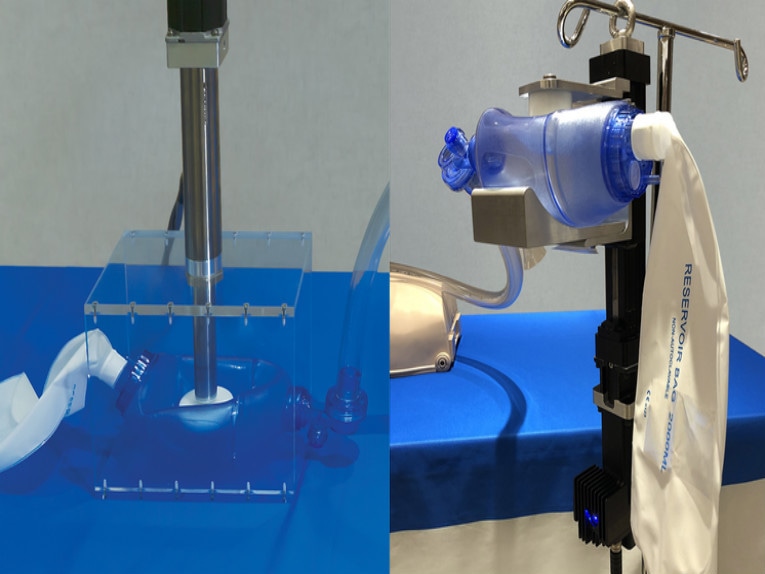
新型人工呼吸器の試作品はリニアアクチュエータを採用
患者への安全かつ効率的な酸素供給。バッグバルブマスク(アンブバッグとも呼ばれる人工手動呼吸器)は、自発呼吸ができない患者に酸素を供給するために使用されます。多くの命を救ってきた一方で、重篤な呼吸障害のある患者の治療には適していません。続きを読む -
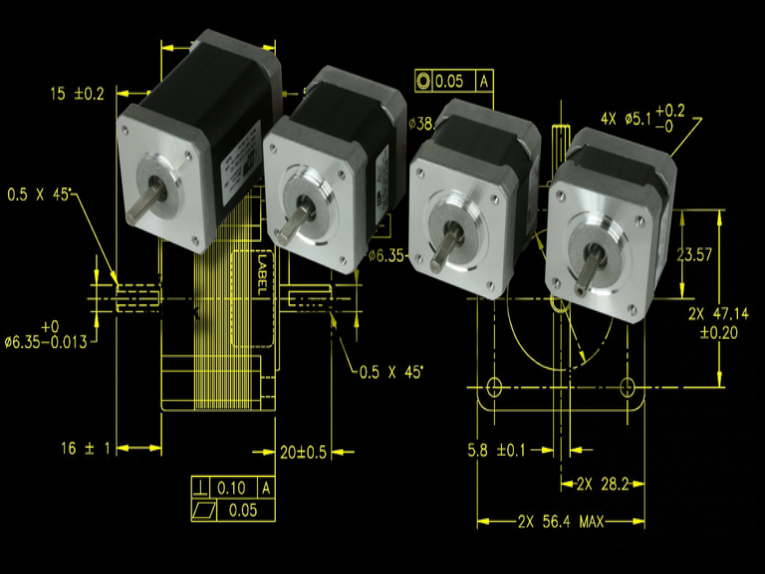
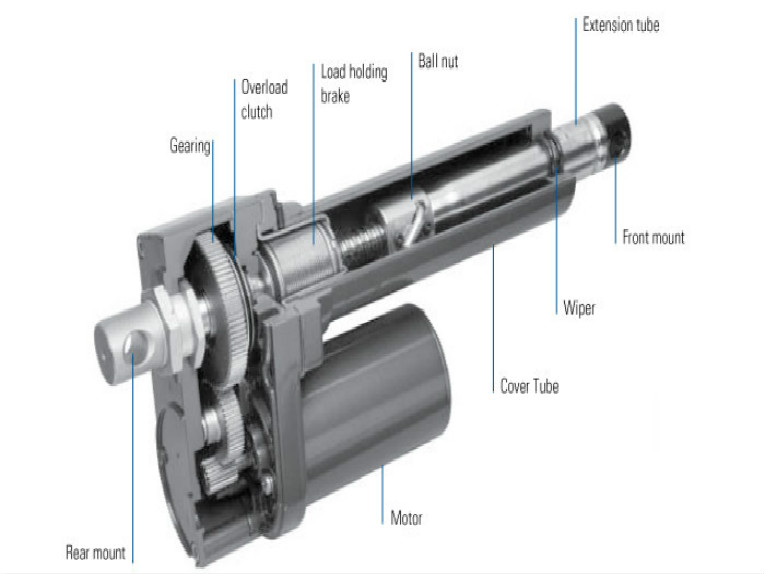
フレームサイズを大きくせずにステッピングモーターのトルクを向上させる
鍵となるのはローターとステーターを積み重ねることですが、物理的にモーターが長くなることは避けられません。ステッピングモーターは、従来はオープンループ制御方式で、フィードバックを必要とせずに正確な位置制御を実現します。ステッピングモーターのシャフトは通常、基本的に離散的な角度運動を行います。続きを読む -
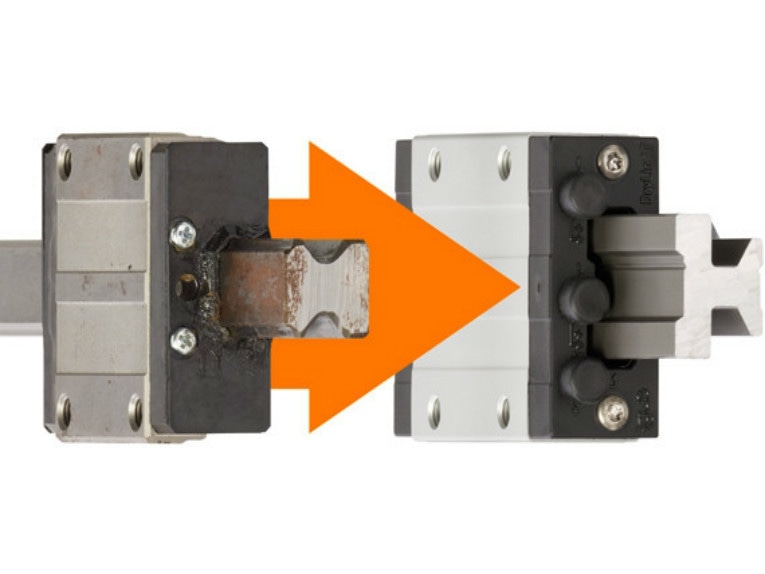
耐腐食性に関する選択肢を理解する
リニアベアリングの選択肢には、ベアリング材料、コーティング、および調達先が含まれます。腐食は、ほとんどの金属に影響を与える酸化反応です。鋼の場合、鉄は空気と水にさらされると酸化して錆を形成し、時間の経過とともに徐々に材料を劣化させます。鋼の表面は…続きを読む -
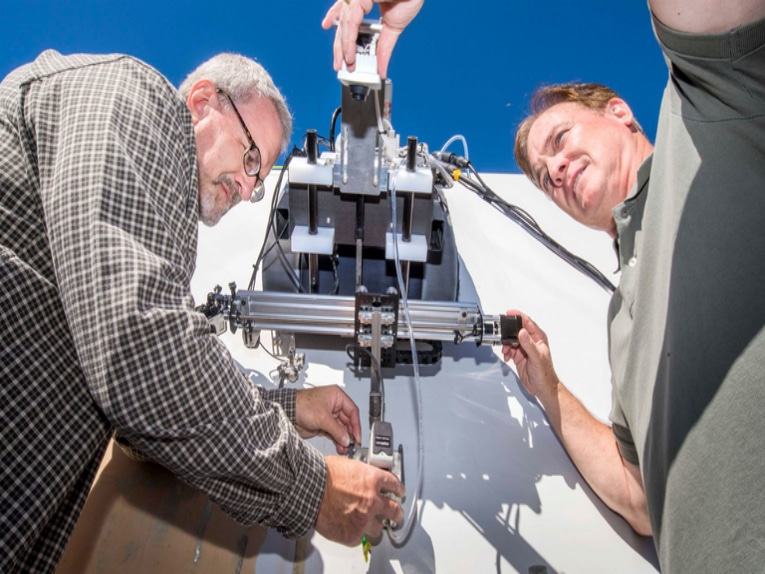
這い回るロボットと飛行ドローンが損傷した風力タービンブレードを検知
ロボット、ドローン、センサーは現在、点検作業に役立っており、そう遠くない将来には完全に自動化される可能性がある。特殊なスキャナーを搭載したドローンやクローラーロボットは、風力タービンのブレードの寿命を延ばすのに役立ち、ブレードの寿命が延びつつある現在、風力発電のコスト削減につながる可能性がある。続きを読む -

初めての産業用ロボットの選定、購入、プログラミング
最初の購入を最大限に活用するための簡単なアドバイスです。ロボットは期待を裏切りません。製造会社が最初の産業用ロボットを導入すると、工場の自動化をさらに進めるために何度も追加購入します。ロボットは生産性を向上させるため、...続きを読む -
モーションコントロールにおけるパルス制御の基礎
2~3軸の電動アクチュエータのみを必要とする機械の自動化には、パルス出力が最も簡単な方法となる場合があります。PLCからのパルス出力を使用することは、シンプルな動作を実現するための費用対効果の高い方法です。ほとんどすべてのPLCメーカーは、パルス出力を使用してサーボやステッピングモーターを制御する方法を提供しています。続きを読む
