







-
リニアモーター統合のための5つのステップ
モーションシステム設計の典型的な構成 直線運動は多くの移動機械の中心であり、リニアモーターの直接駆動方式は、これらの用途における機械全体の設計を簡素化できます。その他の利点としては、リニアモーターが負荷に直接固定されるため、剛性が向上することが挙げられます。続きを読む -
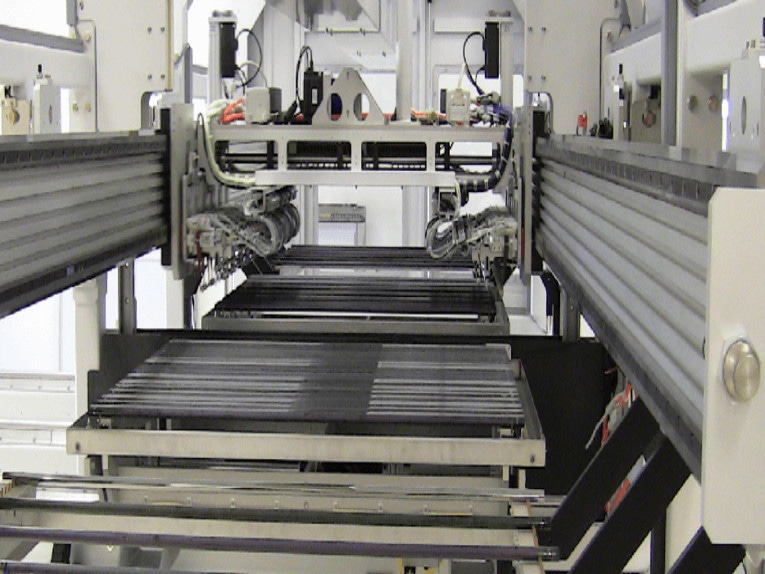
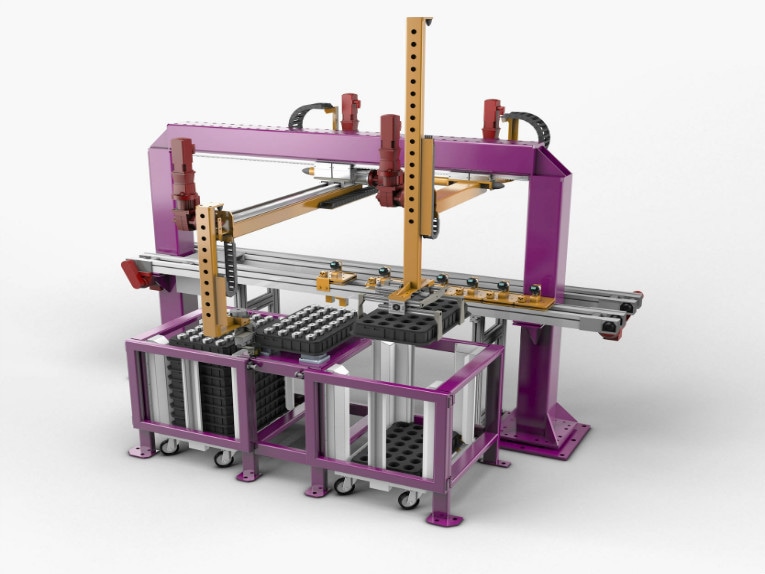
自動直線搬送ツールトレイ
生産ラインから高精度と再現性を得る つい最近まで、生産ラインから高精度と再現性を得ることは困難でした。しかし現在、自動化のための新しいシステムにより、高品質製品の手作業による取り扱いと組み立てに伴う障壁が取り除かれつつあります。ここでは、...続きを読む -
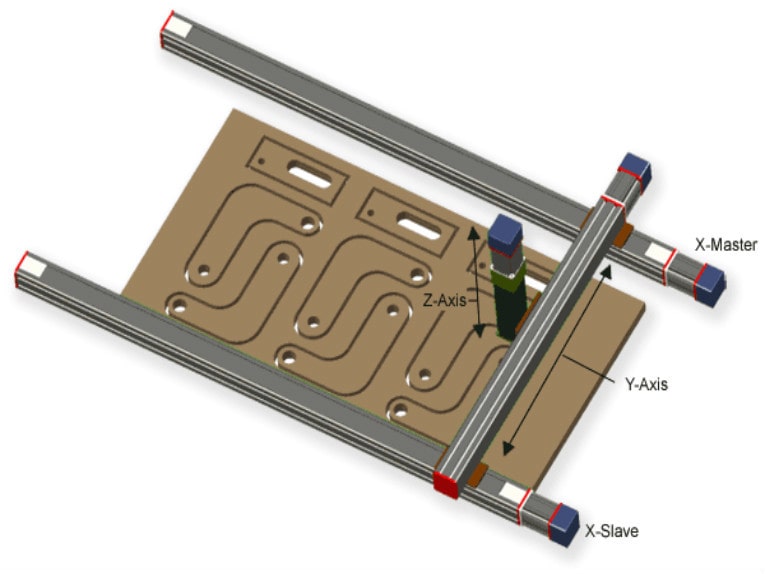
ガントリーシステムにおけるラックとは何ですか?
そして、それをどのように回避できるのか… ガントリーは、他のタイプの多軸システム(直交ロボットやXYテーブルなど)とは異なり、2つのベース(X)軸を平行に配置し、それらを垂直な(Y)軸で接続します。この2つのX軸配置により、広くて安定した設置面積が得られ、…続きを読む -
同期ベルトの騒音の原因は何ですか?また、どのようにすれば騒音を低減できますか?
静音性は、より速く、より長い寿命を意味します。同期ベルトはモーションシステムで一般的であり、チェーンよりもスムーズな動作と優れた高速性能を提供し、精密用途でVベルトを悩ませる滑りや伸びの問題がありません。しかし、同期ベルトの欠点の1つは...続きを読む -

直線運動システムのミスアライメント管理の負担を軽減します
ベアリングの故障原因を防ごう。リニアベアリングが早期に故障することは誰も望んでいません。ベアリングの寿命を脅かす要因は数多くありますが、産業機械の設計者は特にベアリングレールと可動要素間のアライメント誤差に注意する必要があります。アライメント誤差は、ベアリングの寿命を縮めるだけでなく、ベアリングの寿命を縮める原因にもなります。続きを読む -

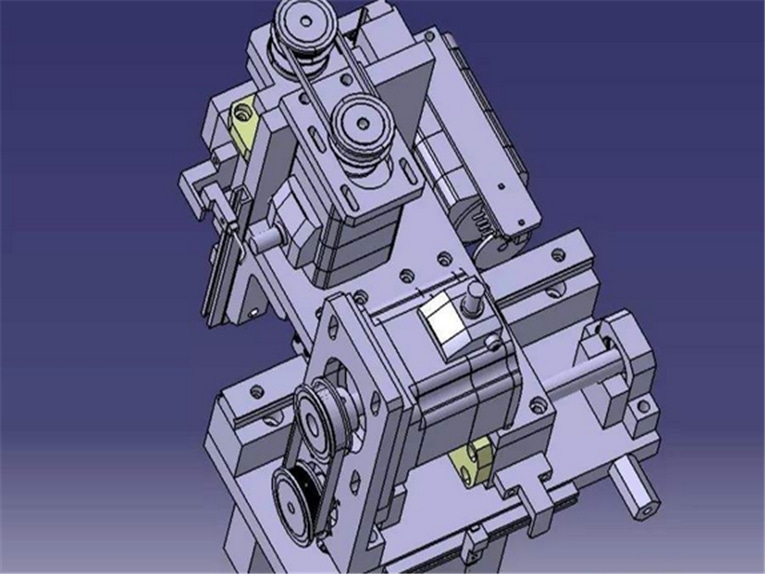
工作機械の動作に応じて異なる駆動方式を採用
メインドライブ メインドライブは主に、閉ループ制御の電気同期モーターと非同期モーターです。その用途には、旋盤、フライス盤、研削盤、およびマシニングセンターで使用されるキットモーターまたはハウジング付きモーターが含まれます。ハウジング付きモーターを使用した従来のスピンドルドライブは、...続きを読む -
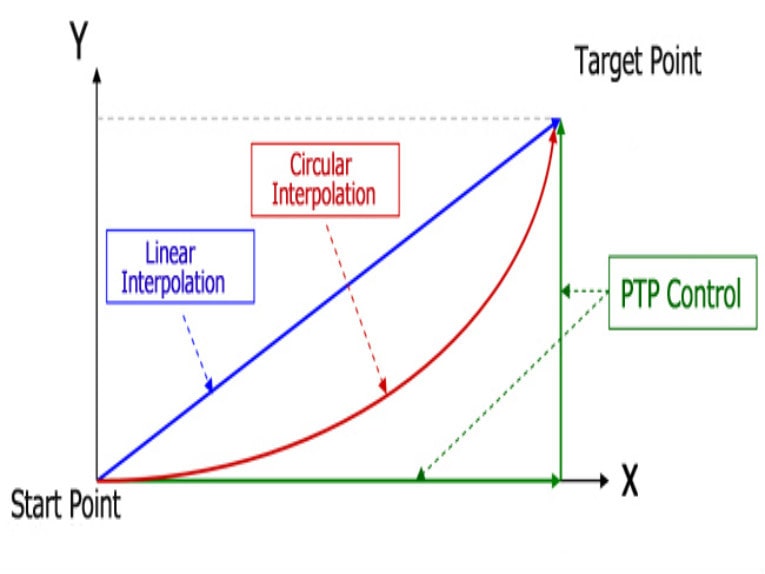
多軸リニアシステムでは、どのような種類の動作を実現できますか?
点間移動、ブレンド移動、輪郭移動。多くの作業において、多軸リニアシステム(直交ロボット、XYテーブル、ガントリーシステムなど)は直線移動を行い、迅速な点間移動を実現します。しかし、塗布や切断などの一部のアプリケーションでは、システムに…続きを読む -
直線運動システム:最も弱い部分と同じくらいしか強くない
精密な動作に不可欠な設計要素の連鎖における5つのリンクをレビューします。直線運動システムは、機械的および電気機械的要素の連鎖の中で最も妥協点となるリンクの強度によってのみ決まります。各コンポーネントと機能(および設計出力への影響)を理解することは、システムの精度向上に不可欠です。続きを読む -
中小製造業者が知っておくべき直交座標ロボットに関する6つのこと
負荷、精度、ストローク、コントローラ、ドライバ、サプライヤー。 1. より重い負荷に対応可能 - 直交ロボットは 20 kg のペイロードも問題なく扱えるため、メカニズムの小型化、より小さなコンポーネントの使用、よりシンプルな制御によりコスト削減が可能になります。 2. 難しい向きにも対応可能 - 直交ロボットは...続きを読む -
重労働を担う:直交座標ロボットが最も有効な場面
ターミネーターサイズのロボットは大丈夫? 直交座標ロボットと比較すると、SCARAまたは6軸システムは一般的に、より高いコストとより高度なプログラミング要件を伴うものの、箱から出してすぐに高い性能を発揮しますが、設置面積が小さく、重量が軽く、アームの伸展剛性も低くなります。一方、...続きを読む -

リニアアクチュエータの主な種類は何ですか?
ベルト駆動/ねじ駆動/空気圧駆動/ラックアンドピニオン駆動/リニアモーター駆動 【ベルト駆動およびねじ駆動アクチュエータ】 ベルト駆動とねじ駆動は異なる技術ですが、電気機械式アクチュエータで最も一般的な2つのタイプであるため、同じカテゴリに分類するのが妥当です。続きを読む -

多軸モーション設計における直列運動学と並列運動学の違いは何ですか?
私たちは位置決め問題を解決しています。今日の位置決めテーブルとステージは、特定の出力要件を満たすために、これまで以上にカスタマイズされたハードウェアとソフトウェアを備えています。これにより、複雑な多軸コマンドでも正確に動作するモーション設計が可能になります。高精度フィードバック...続きを読む
