







-
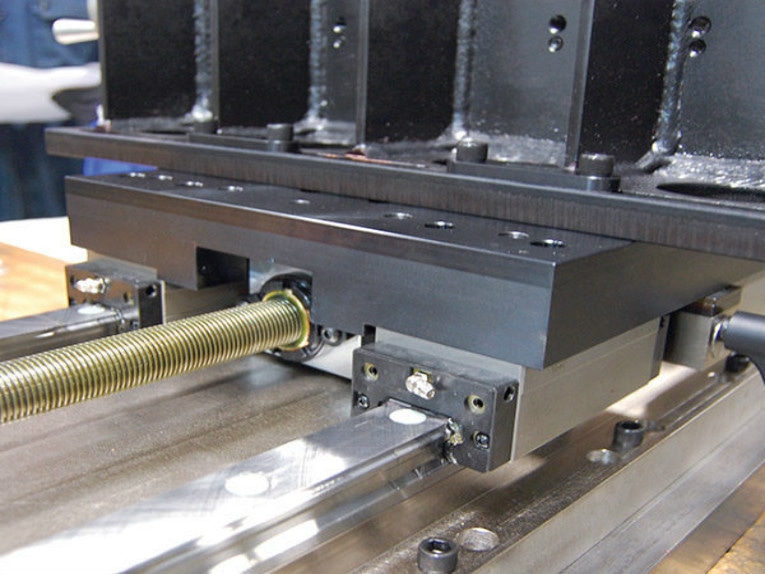
直線運動システムにおけるアクチュエータとガイドの位置合わせに関する規則
直線運動システムの設計に関するいくつかの簡単なガイドラインに従うことで、システム性能とアクチュエータ寿命を向上させることができます。多くの自動機械は、可動部品をガイドおよび支持するために、プロファイルレール、丸レール、その他の転がり軸受または滑り軸受構造などの直線ガイドコンポーネントに依存しています。続きを読む -
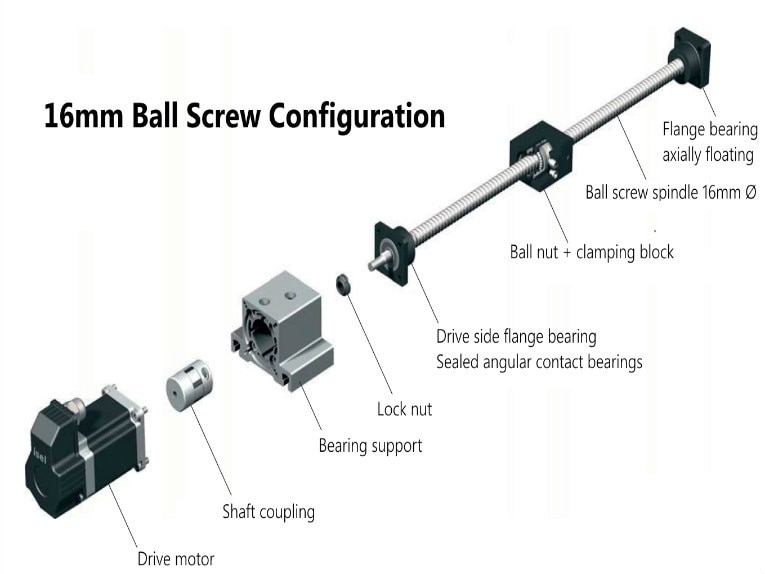
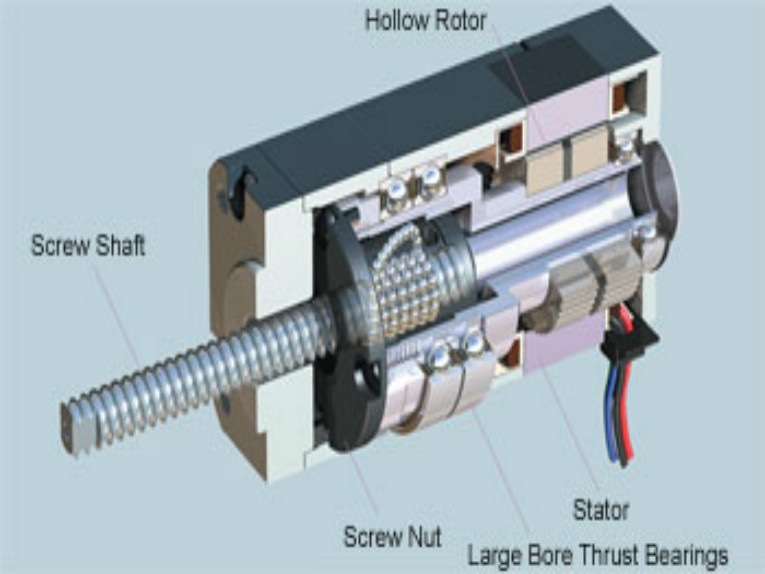
リニアモーター vs. ボールねじ
独自の設計にコスト効率よく適用する。鉄心レスリニアモーターは半導体や電子機器の用途で10年以上使用されていますが、多くの設計者やOEMからは依然として「ニッチ」な製品と見なされています。しかし、リニアモーターは高価なソリューションであるという認識は…続きを読む -
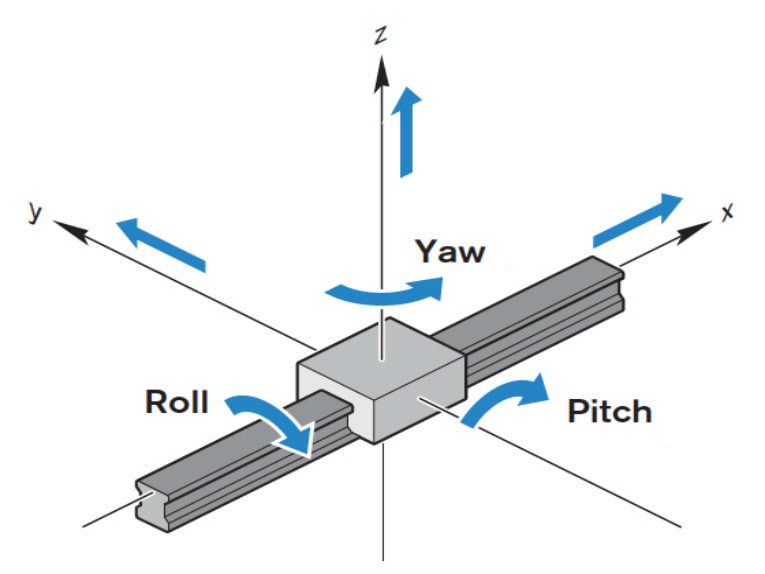
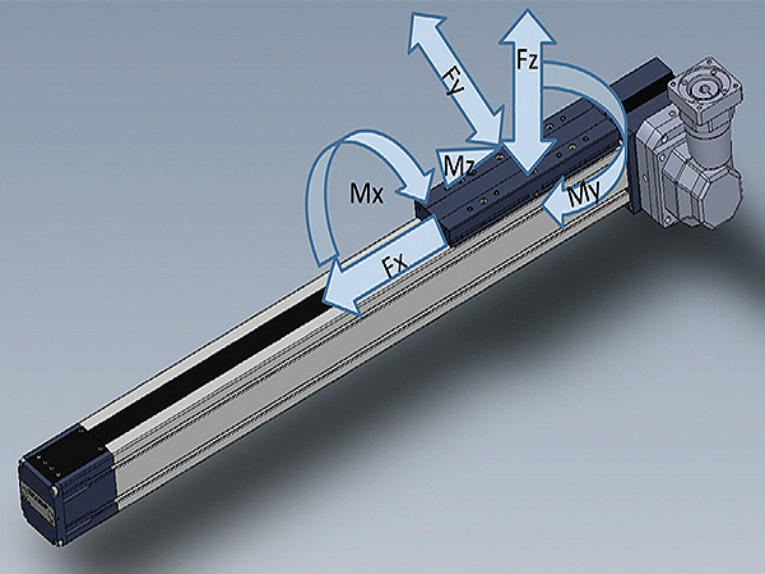
運動の基礎:直線システムのロール、ピッチ、ヨーの定義方法
直交ロボット、ガントリーシステム、XYテーブルなどが含まれます。リニアガイドおよびシステムは通常、下方、上方、および側方荷重による直線力と、オーバーハング荷重による回転力の両方を受けます。回転力(モーメント力とも呼ばれる)は通常、次のように定義されます。続きを読む -

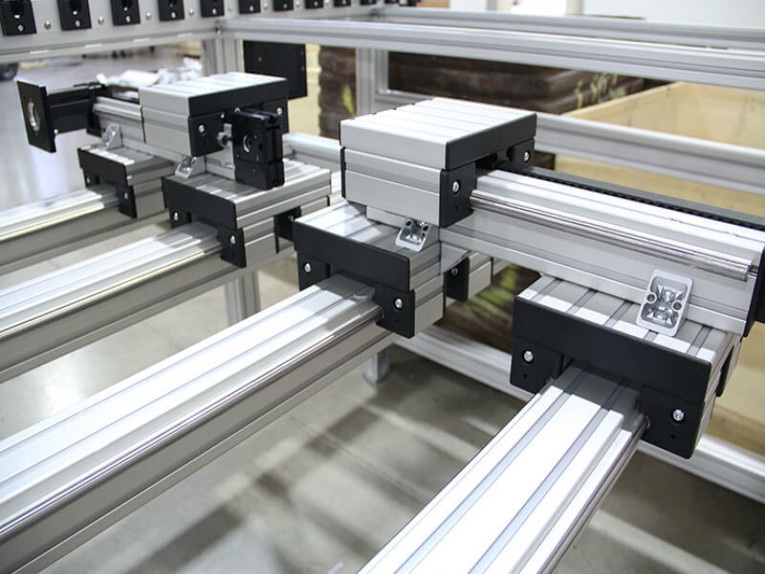
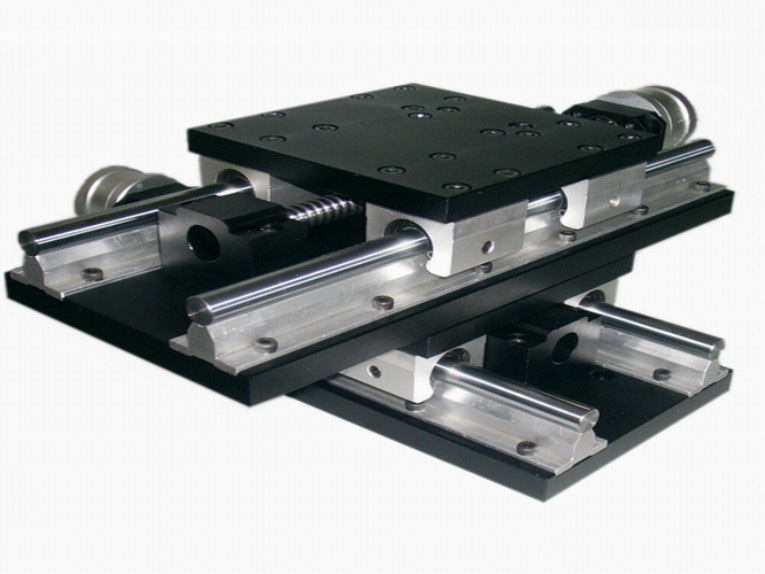
直線位置決めステージ/テーブル
ガントリーシステム用直交ロボット 位置決めステージとテーブルは、モーションコントロールシステムにおいて、ワークピースを固定したり、何らかの作業のために位置決めしたりするために使用されます。ステージやテーブルは、直線型であれ回転型であれ、ほとんどの場合、完全なモーションサブシステムです。つまり、それ自体がモーションシステムなのです。続きを読む -
線形システムの選定ガイド
ベルト駆動、ボールねじ駆動、ラックアンドピニオン駆動、リニアモーター駆動、空気圧駆動システム。機械設計者や製造者が、独自の直線システムをゼロから構築するか、限られた範囲の既製システムで妥協するかを選択しなければならなかった時代は終わりました。続きを読む -
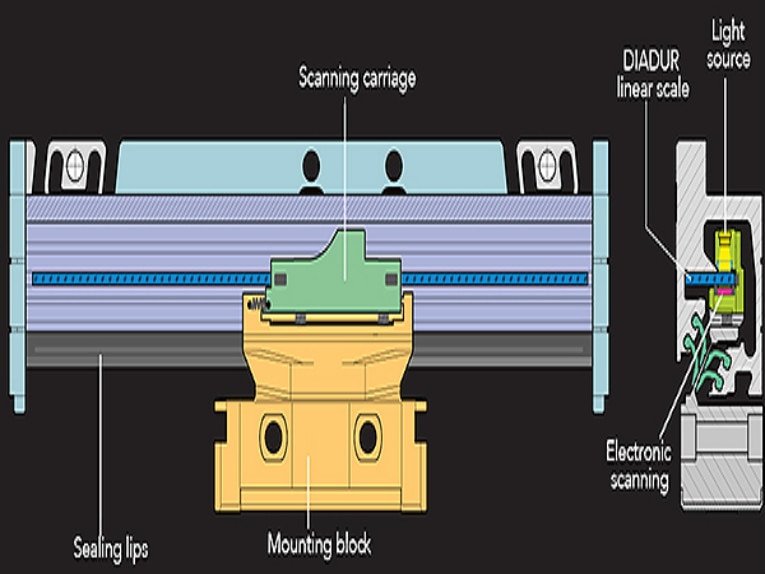
リニアエンコーダにより精度が向上する
リニアエンコーダは、機械的なリンク機構の下流で発生する誤差を補正することで精度を向上させます。リニアエンコーダは、中間的な機械要素なしで軸の位置を追跡します。エンコーダは、機械的なリンク機構(回転から直線への機械装置など)からの伝達誤差も測定し、制御に役立ちます。続きを読む -
予測可能で信頼性の高い直線運動を実現する方法
精度と再現性、容量、移動距離、使用状況、周囲環境、タイミング、方向、レート。ここでは、精度、容量、移動距離、使用状況、周囲環境、タイミング、方向、レートの頭文字をとってACTUATORという略語を使って、リニアモータ駆動アクチュエータを正しく指定し、サイズを決定するためのヒントをいくつか紹介します。続きを読む -

水平・垂直リニアステージ Z軸位置決めステージ
今日のポジショニングステージは、特定の厳しい出力要件を満たすことができます。これは、カスタマイズされた統合と最新のモーションプログラミングにより、ステージが驚異的な精度と同期を実現できるようになったためです。さらに、機械部品とモーターの進歩により、OEMは将来の計画を立てやすくなっています。続きを読む -
リニアアクチュエータのサイズを縮小する方法
XYステージや3Dプリンターなどの小型加工センター向けのソリューション。リニアアクチュエータは幅広いサイズがありますが、ここ数年、メーカーはよりコンパクトな設置面積を重視しています。しかし、アクチュエータがどれほど小さくても、モーターを追加することで、...続きを読む -
モーショントレンド最新情報:ポジショニングステージが実用的なデザインを推進
過去10年間におけるモーション技術の主な進歩は、制御システムとエレクトロニクスの分野で起こりました。今日のポジショニングステージは、特定の要求の厳しい出力要件を満たすことができます。これは、カスタマイズされた統合と最新のモーションプログラミングによって、ステージが驚異的な精度を実現できるようになったためです。続きを読む -

リニアガイドの精度を選択する方法
取り付けに関する考慮事項、単一レール上の単一ブロック、単一レール上の複数ブロック、複数レール上の複数ベアリング。循環式リニアガイドを選択する際には、サイズ、予圧、精度など、いくつかの基準を指定する必要があります。そして、「精度」という用語は…続きを読む -
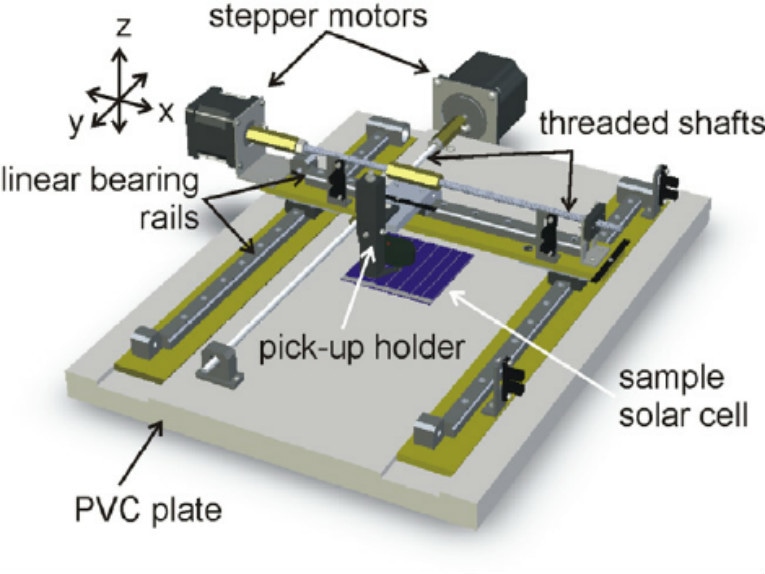
XYテーブル:直交座標系やガントリーシステムとはどのように異なるのでしょうか?
一般的なXYテーブル設計では、非常に高い移動精度と位置決め精度を実現するために、クロスローラー式スライドとボールねじ駆動が用いられます。X、Y、Z方向(デカルト座標系とも呼ばれる)の直線運動システムを構築する方法は数多くあります。これらのシステムを指すために一般的に使用される用語は…続きを読む
