







-

垂直昇降ステージとZ軸アクチュエータの違いは何ですか?
垂直方向の動きを必要とする多くのアプリケーションでは、Z軸アクチュエータが直交座標系またはガントリー型の配置で1つまたは2つの水平軸と組み合わされます。このような多軸構成では、移動する荷重はブラケットを介してZ軸に取り付けられ、モーメント荷重が発生します。このモーメント荷重は、移動対象だけでなく、...続きを読む -

多軸センサーは製品開発をどのように改善しているのか?
多軸センサー設計では、1つのロードセルセンサーで3軸の力と3つのトルクモーメントを同時に測定できます。これらのセンサーは、複数のブリッジで構成されており、他の軸からのクロストークを最小限に抑えながら、1方向からの印加力を正確に測定します。多軸センサーを使用すると、...続きを読む -

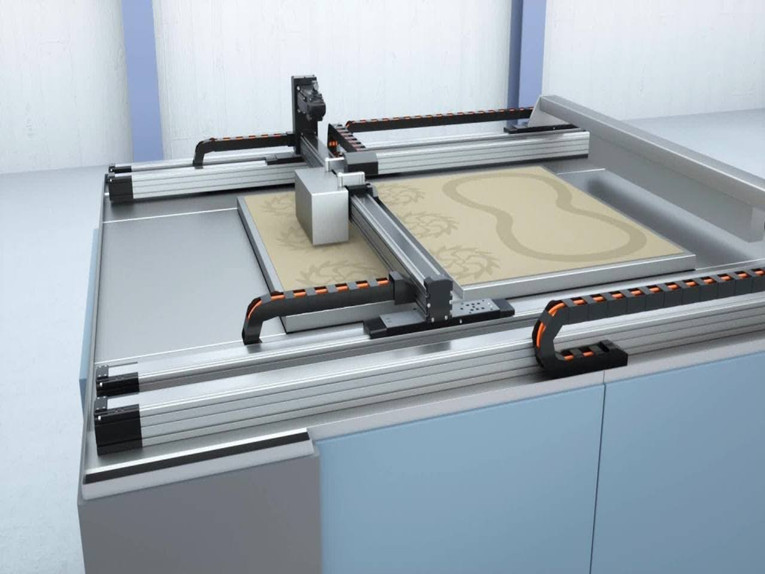
直線運動用途に適したモーターの選定
直線運動システムは、精密レーザー切断システム、実験室自動化装置、半導体製造装置、CNCマシン、工場自動化装置など、数えきれないほどの機械に搭載されています。その種類は、比較的単純なものから、...続きを読む -

医療機器製造業を未来へ導く方法
「未来の工場」システムは、拡張性と汎用性を高めた自動化ソリューションを可能にし、デバイスメーカーがシステムの機能に合わせてプロセスステップ、プロセス速度、プロセスサイクルを構築できるようにします。医療機器の製造プロセスは高度に規制される傾向があり、...続きを読む -

直線運動の総所有コスト
気づいていないかもしれませんが、あなたが購入する商品の多くは、実際には最初に支払った価格よりもはるかに多くの費用がかかっています。たとえば、車を25,000ドルで購入したとしましょう。あなたは毎週どれくらいの距離を運転し、何ガロンのガソリンを使用しますか?オイル交換はどれくらいの頻度で行いますか?続きを読む -
直線運動部品用ステンレス鋼ガイド
腐食環境を伴う用途では、リニアモーションシステムの設計者は、脆弱な部品を保護するためにカバーを使用したり、特殊なコーティングやメッキを施した部品を注文したり、機械やシステム内に敏感な部品を戦略的に配置したりするなど、予防措置を講じることができます。続きを読む -
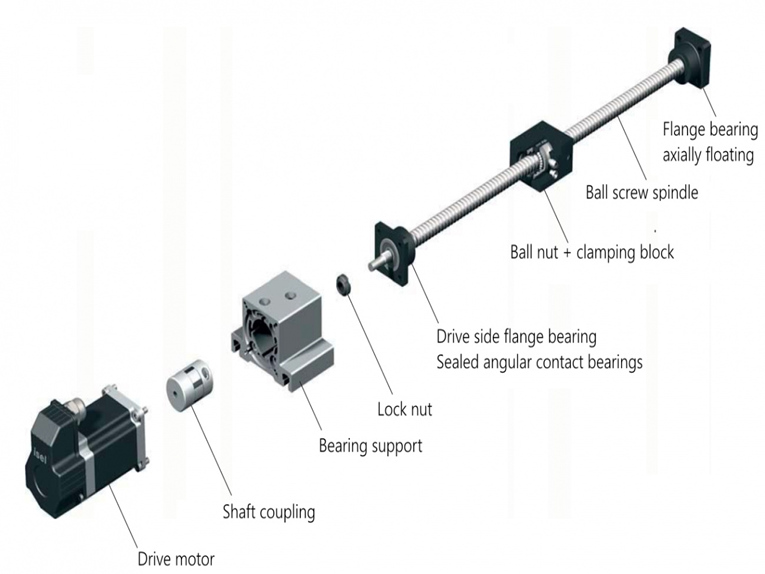
直線運動設計工学とは何か?技術概要。
直線運動は、リニアモーター、リニアアクチュエータ、リニアローリングガイドおよびベアリングなど、いくつかの技術を含むモーションコントロールの分野です。 リニアモーター - 正確なオプション 従来のリニアモーターは基本的に永久磁石回転モーターで、...続きを読む -

直線運動におけるモーメントとトルクの違いは何ですか?
直線運動においては、直線ガイドから離れた位置に力が加わる場合(片持ち荷重、またはモーメント荷重と呼ばれる)を扱うことがよくあります。このような場合、ガイドのモーメント荷重容量、つまり回転に対する抵抗力が重要になります。しかし、同時に、構成要素も考慮する必要があります。続きを読む -
スマートメカトロニクスが直線運動アプリケーションに新たな機能を追加
今日の製造システムOEMや自動化エンドユーザーは、業務効率化に役立つ技術革新を常に求めている。インダストリー4.0のイノベーションは、デジタルエレクトロニクスと通信インターフェースを組み合わせた、より高度なスマートテクノロジーという新たな潮流を生み出した。続きを読む -

リニアモーションシステムをクリーンルーム対応にする方法
リニアガイドやネジなどの直線運動部品への汚染物質の混入を防ぐことの重要性についてはよく議論されますが、これらのシステムがクリーンルームで使用される場合、目標は正反対です。つまり、これらの部品が環境に汚染物質を持ち込まないようにすることです。具体的には…続きを読む -

直線運動システムにおける摩擦に影響を与える要因は何ですか?
設計者やエンジニアは通常、直線運動システムにおける摩擦を回避または軽減しようとします。摩擦は必ずしも悪いものではなく、用途によっては減衰効果をもたらし、サーボチューニングの改善に役立つ場合もありますが、直線運動システムにおいては、摩擦によって必要な力が増大します。続きを読む -
パンデミックがリニアモーション部品の製造と用途に及ぼす影響
直線運動部品には、様々なタイプの直線アクチュエータから直線ガイド、スライド、ウェイ、そしてその間の多数の部品まで、あらゆるものが含まれます。それらすべてに共通しているのは、その開発と製造が技術動向とより広範な市場動向の両方の影響を受けていることです。続きを読む
