ヘルプ

-
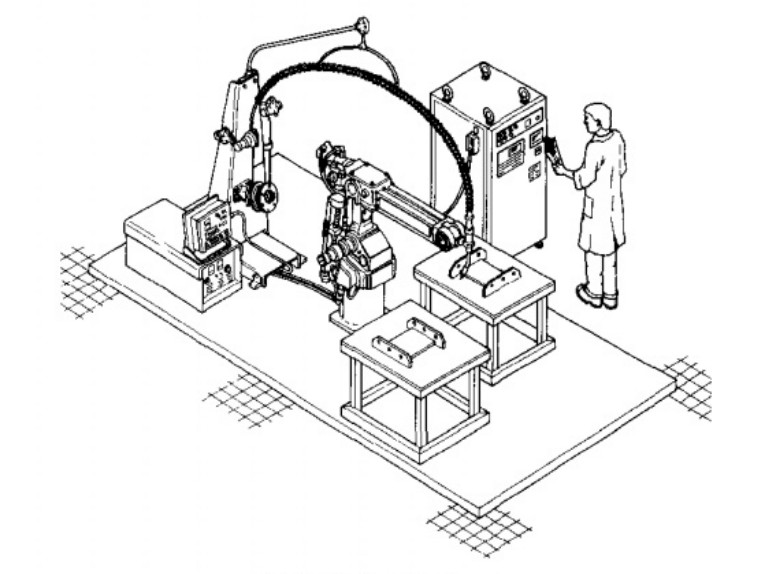
産業用ロボットは、製造業において人間の代わりに用いられる自動化された機械です。より高速で高精度であり、数日間連続稼働できるという特長が、製造業界における産業用ロボットの普及を後押ししています。産業用ロボットは、主に7つのカテゴリーに分類されます。
続きを読む -
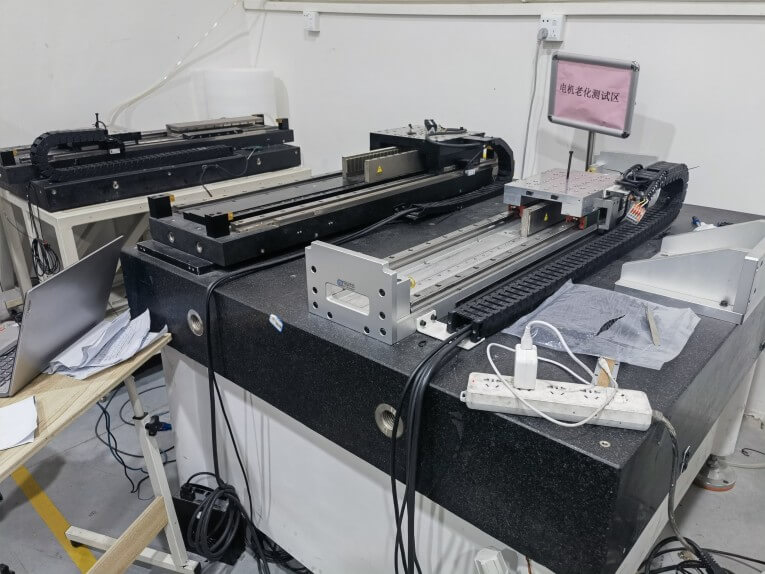
リニアモーター リニアモーターは、直線運動で直線的な力を発生させ、追加の伝達機構なしに電気エネルギーを機械エネルギーに変換する直接駆動型の電動モーターです。回転するモーターを半径方向から切り離し、直線運動で直線運動を行うモーターと考えることができます。
続きを読む -
リニアモーターは優れた出力を発揮するため、医療機器、産業オートメーション、パッケージング、半導体製造などの分野で活躍します。さらに、新しいリニアモーターは、初期バージョンのコスト、発熱、統合の複雑さといった課題を解決しています。改めて説明すると、リニアモーターはコイル(一次側または二次側)を備えています。
続きを読む -
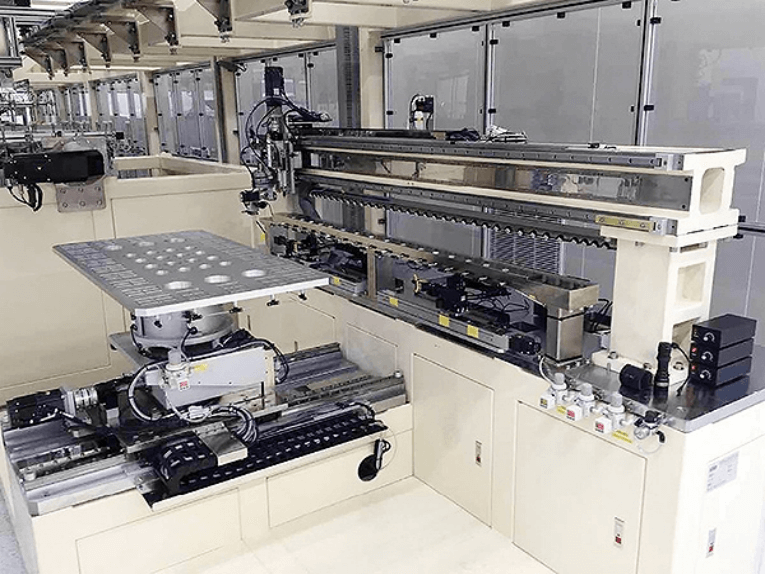
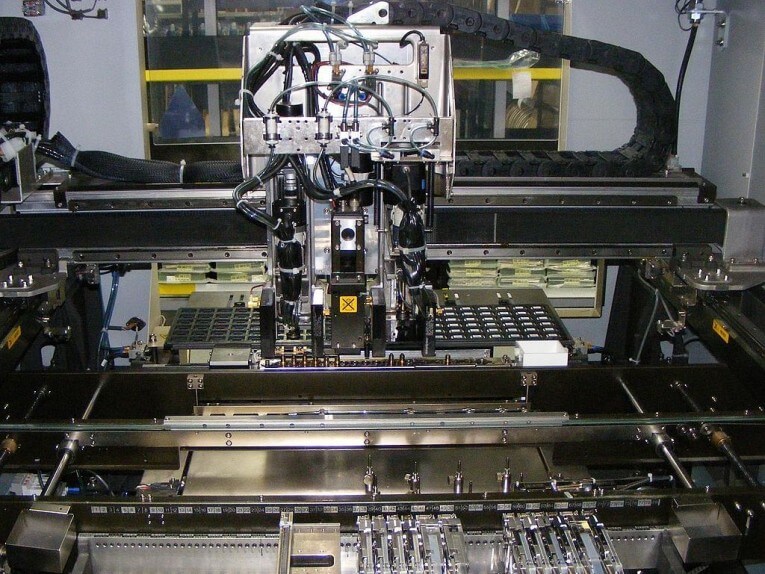
ピックアンドプレースロボットを使用する産業 ピックアンドプレースロボットは、産業用ロボットとしてさまざまな分野で使用されています。これらのロボットを使用している産業には、次のようなものがあります。 包装: 包装は、ピックアンドプレースロボットの最も一般的な用途の 1 つです。食品包装から...
続きを読む -

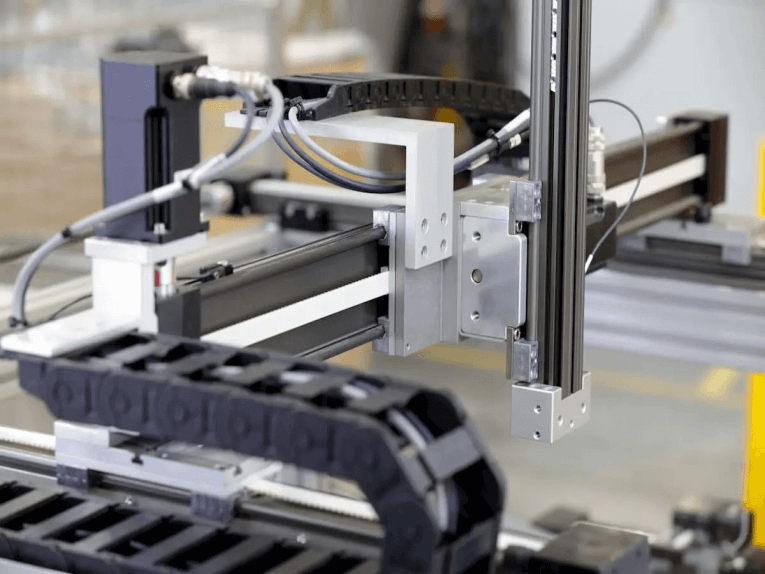
ピックアンドプレースロボットには、次のようなさまざまな種類があります。直交座標ロボット:直交座標ロボットは、X、Y、Z座標(直交座標として知られています)を使用して、複数の平面でアイテムを移動します。高速ピックロボット:高速ピックロボットは、非常に高速でアイテムをピックアップします。そのため、H...
続きを読む -

食品加工・包装業界は急速に成長しています。高まる需要と求められる効率性に対応するため、メーカーは従来は熟練した手作業が必要だった作業をロボットで行っています。ピックアンドプレースロボットは、最も一般的に使用されている自動化技術の一つです。
続きを読む -

ピックアンドプレースロボットは、幅広い用途で利用可能です。ここではピックアンドプレースロボットの概要を説明しますが、用途に最適なピックアンドプレースロボットの種類は、具体的な要件によって大きく異なります。ロボットピックアンドプレースシステムは、以下のように構成できます...
続きを読む -
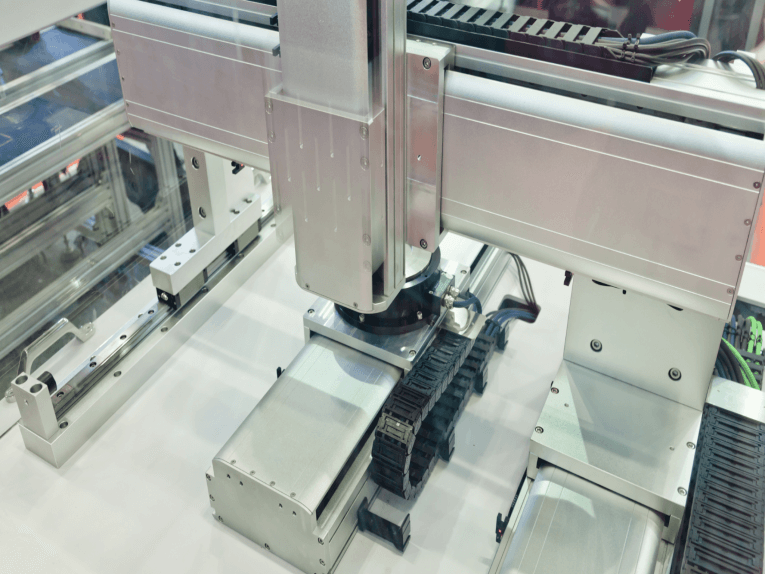
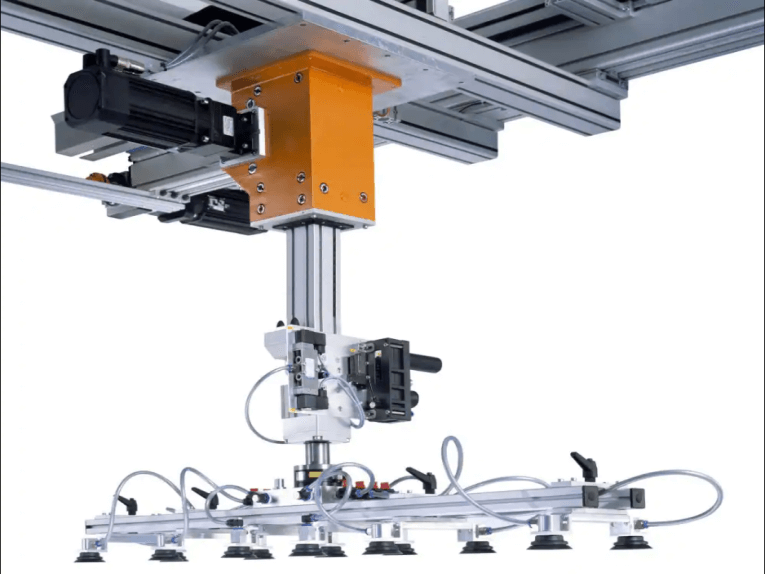
ロボットの分類を詳しく見ていきましょう。1) 直交ロボット:別名:リニアロボット/XYZロボット/ガントリーロボット 直交ロボットとは、3つの主要な制御軸が直線で互いに直角になっている産業用ロボットと定義できます。剛性の高い構造を利用して…
続きを読む -
産業用ロボットの概要 産業用ロボットとは、製造に使用されるロボットシステムのことです。産業用製造ロボットは多様な機能を備えているため、幅広いタスクを実行できます。産業用ロボットは、さまざまなタスク(例えば、パイプの挿入、パイプの切断、パイプの切断など)を実行します。
続きを読む -
各タイプのピッキング&パッキングロボットは、製造工程における様々なタスクを効果的かつ効率的に実行できる能力を備えているため、真の課題は、工場の運用ニーズに最適な構成を持つロボットを選択することです。以下に、その他の考慮事項をいくつか挙げます。
続きを読む -

ロボットは製造プロセスに革命をもたらし、人間が負担による怪我の原因となる危険で反復的な作業を行う必要がなくなる、効率的で費用対効果の高い手段を提供しています。ピックアンドプレースアプリケーションは、組み立てプロセスの中で最も一般的なものの1つであり、...
続きを読む -

特定の電子機器製造プロセスを自動化する必要があることは明らかですが、すべての機械がすべてのシナリオに適しているわけではありません。自動化が貴社にとってプラスになるかどうかは、貴社の状況と事業内容によって決まります。自動化が貴社にとってプラスになる一般的な理由をいくつか見ていきましょう。
続きを読む







