







-

Проста опорна конструкція підвищує ефективність складської упаковки
Підвищення ефективності упаковки вимагало уваги до ергономіки, простоти складання та економічної ефективності. Автоматизація змінює те, як працюють традиційні розподільчі центри, оскільки компанії шукають нові способи максимізації своєї ефективності, підвищення точності замовлень та задоволення попиту клієнтів. ...Читати далі -

Що таке світлодіодний матричний екран?
Високоякісні світлодіодні рекламні щити-підривники. Динамічні злети та падіння кожного модуля матричного світлодіодного екрана Fuyu поєднуються з відеоекраном, утворюючи різні креативні комбінації. Термінатор двовимірної площинної реклами очолює епохальну хвилю заміни медіа та сприйняття реклами...Читати далі -
Як оцінити ваші потреби в лінійному приводі з мінімальними даними про застосування
Навантаження, точність, швидкість та переміщення. Вибір компонентів лінійного руху на етапі розробки проекту був джерелом розчарування для конструкторів та інженерів-прикладників протягом десятиліть, особливо коли йдеться про складні вузли, такі як лінійні приводи. Розглянемо на мить...Читати далі -

Який тип лінійного приводу найкраще підходить для сил тяги?
Електромеханічні конструкції в системах керування рухом. Коли для застосування потрібні чисті сили тяги, найкращим типом лінійного приводу часто є стрижневий привід. Ці електромеханічні пристрої, які також називають «тяговими приводами» та (коли двигун інтегрований) «електричними приводами»...Читати далі -

Лінійні приводи: рішення «виготовити» проти «купити»
Оцінка бізнесу, Вимоги до виробництва та складання, Потреби в підтримці клієнтів. З огляду на широкий асортимент лінійних приводів на ринку, машинобудівникам та кінцевим користувачам стає легше знайти стандартний або «спеціально розроблений» продукт, який відповідає навіть найунікальнішим вимогам застосування...Читати далі -
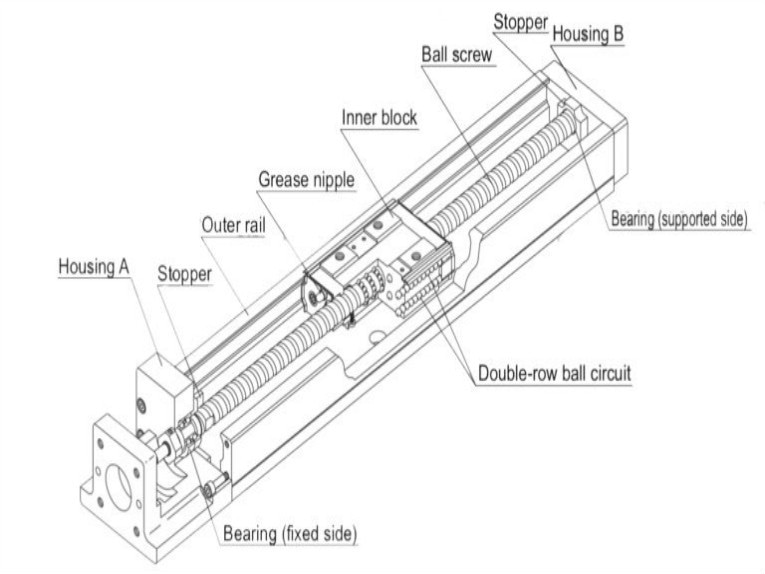
Основи приводів: п'ять різних технологій, інтегрованих в один корпус
Джерело рушійної сили, засіб передачі, підшипник або напрямна, рама або опорна конструкція, зворотний зв'язок по положенню (у більшості випадків). Ще однією дуже заплутаною галуззю мехатроніки є область виконавчих механізмів. Проблема полягає в тому, що ви можете придбати виконавчі механізми, які є збірками з кількох компонентів, або ж...Читати далі -

Які міркування слід враховувати при виборі лінійних приводів у забрудненому середовищі?
Тут показано типове забруднене середовище. Надійний рух часто важко забезпечити, коли робоче середовище сильно забруднене сміттям або містить екстремальні умови, такі як широкий діапазон температур чи інші фактори навколишнього середовища. Використання машин для операцій, що...Читати далі -
Високошвидкісні лінійні приводи: що кваліфікує їх як високошвидкісні?
Діаметр гвинта, довжина або розташування торцевого підшипника. Як і багато термінів, що використовуються в галузі лінійного руху – «надміцний», «мініатюрний» та «стійкий до корозії», і це лише деякі з них – не існує галузевого стандарту, який би визначав, що являє собою «високошвидкісний» лінійний привід. Тим не менш, існують деякі...Читати далі -
Чи може лінійний привід забезпечити жорсткість і точність лінійної платформи?
U-подібні лінійні приводи виготовлені з екструдованої сталевої основи. Хоча галузевих стандартів, що визначають лінійні приводи та лінійні платформи, немає, загальноприйнята термінологія вказує на те, що лінійний привід зазвичай виготовлений з алюмінієвої екструзії або основи, тоді як...Читати далі -

Що таке храповий механізм у синхронних ремінних передачах?
Правильне натягнення синхронних ременів – це натяг, при якому ремінь передаватиме необхідну потужність без храпування, коли система приводу зазнає повного навантаження. Синхронні ремені (також звані зубчастими, зубчастими, ГРМ або ременями з високим крутним моментом) використовують профільовані зубці, які входять у зачеплення зі шківом...Читати далі -
5 ключів до «Простої мехатроніки»
Структура, компоненти, електропроводка, ремонтопридатність. Поєднання механічної, електричної, програмної та контрольної інженерії не є легким. Але інтеграція технологічних досягнень та зосередження на цих п'яти областях може спростити процес та забезпечити легкість використання мехатроніки....Читати далі -

Що потрібно знати про корозійностійкі лінійні напрямні
Особливо для застосувань, що вимагають відповідності FDA або USDA. Рециркуляційні кулькові та роликові напрямні є основою багатьох процесів автоматизації та машин завдяки високій точності ходу, хорошій жорсткості та чудовій вантажопідйомності — характеристикам, що стали можливими завдяки використанню високоякісних...Читати далі
