







-

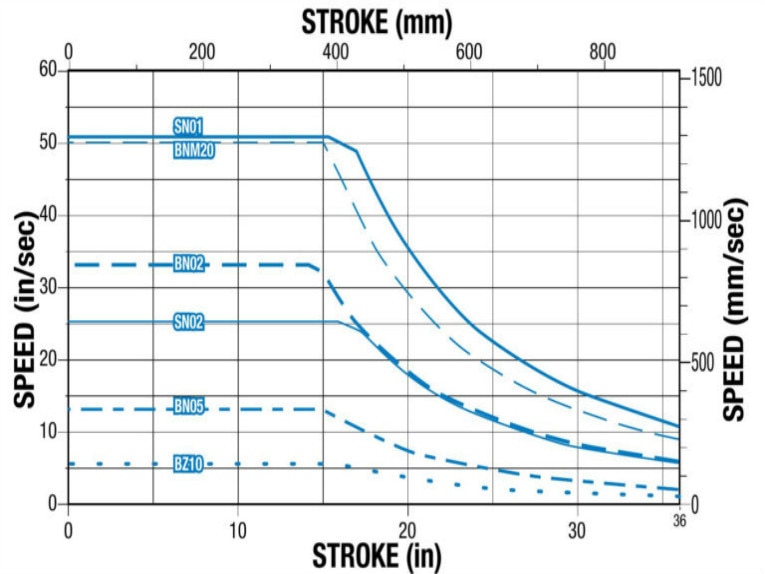
Високошвидкісні лінійні приводи: що кваліфікує їх як високошвидкісні?
Швидкість в першу чергу залежить від механізму приводу. Як і багато термінів, що використовуються в галузі лінійного руху – «надпотужний», «мініатюрний» та «стійкий до корозії», і це лише деякі з них – не існує галузевого стандарту, який би визначав, що являє собою «високошвидкісний» лінійний привід. Тим не менш, існує так багато...Читати далі -

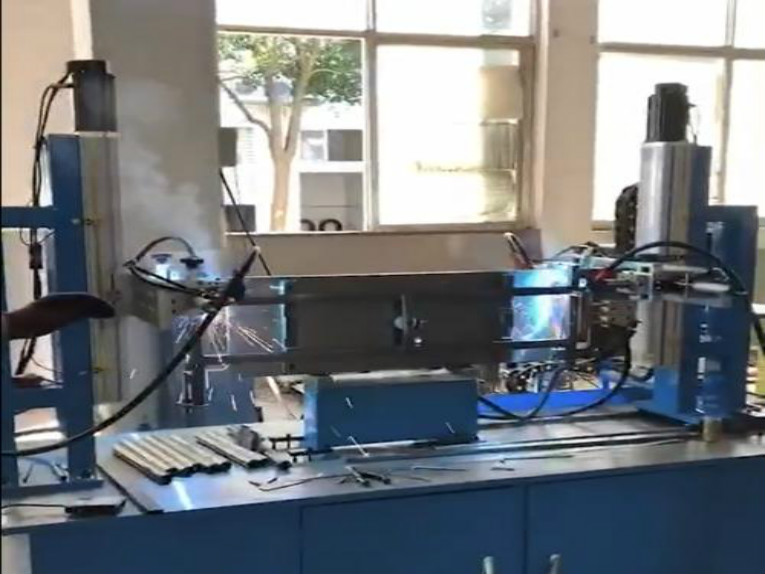
5 найкращих застосувань промислової робототехніки
Збірка, комплектація та пакування, видалення матеріалів, зварювання, фарбування. Від харчової промисловості до автомобільного виробництва, промислові роботи стають повсюдними. Високоавтоматизовані та програмовані, ці машини виконують повторювані завдання з високою точністю, надійністю та продуктивністю. Завдяки цим функціям...Читати далі -
Що робити, коли ваша система руху виходить з ладу
Як кільцеві та рейкові системи порівнюються між собою Кільцеві та рейкові системи на основі напрямних коліс є компактнішими та пропонують кращу точність позиціонування й більше варіантів для перевезення вантажів, ніж альтернативні конвеєрні системи для криволінійних застосувань. У постійному прагненні до зниження виробничих витрат, один з...Читати далі -

П'ять речей, які слід враховувати під час вибору лінійного приводу
Довжина ходу, швидкість, точність, кріплення, обслуговування. Ви працюєте над застосуванням, яке вимагає лінійного руху – можливо, це система складання типу «підбирай і розміщуй», пакувальна лінія або портал для переміщення матеріалу – але проектування власного приводу з нуля, пошук різних деталей, кріплення...Читати далі -
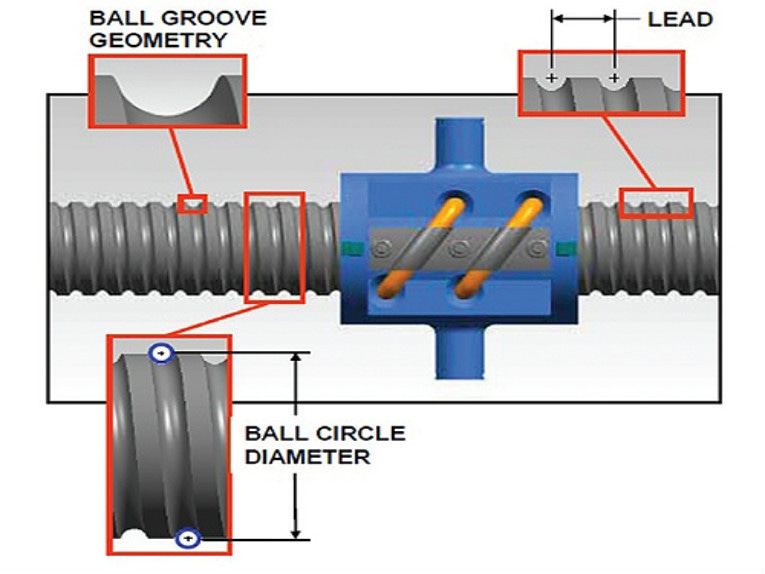
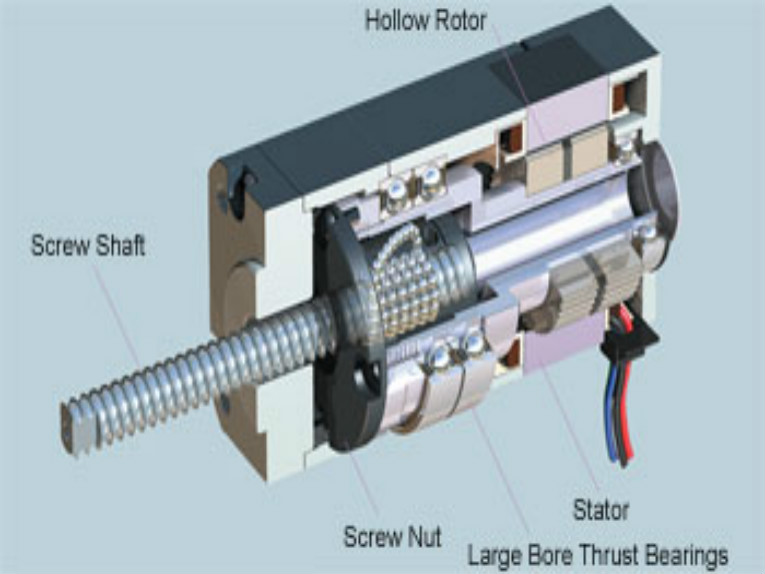
Як визначити, вибрати та застосувати лінійні кулькові гвинтові приводи
Системи повернення кульок, вибір кулькогвинтової гвинти та змащування кулькогвинтової гвинти. Вибір правильної кулькогвинтової гвинти для певного застосування забезпечить точність, повторюваність та термін служби машини, мінімізуючи загальну вартість володіння. Кулькогвинтова передача перетворює обертальний рух на лінійний або ві...Читати далі -
Як оцінити ваші потреби в лінійному приводі з мінімальними даними про застосування?
Високі моментні навантаження можуть диктувати використання лінійного приводу з двома рейками. Вибір приводу на основі наближених вимог до продуктивності, можливо, є більш ризикованим, ніж вибір лінійної напрямної або приводу з мінімальною інформацією про застосування. Але все ж досить поширена ситуація, коли...Читати далі -
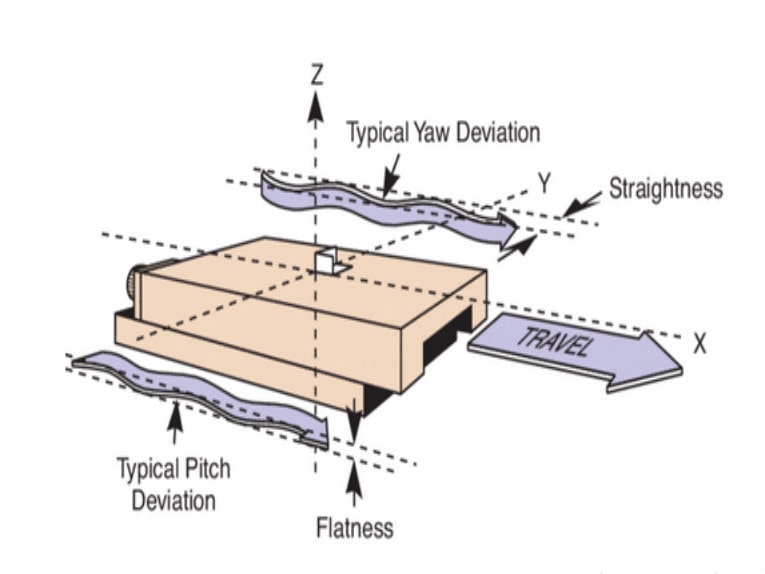
Чи потрібна моїй системі висока точність або повторюваність (або і те, й інше)?
Вибір компонентів та конструкція машини впливають на точність та повторюваність системи. Перш ніж відповісти на це питання, давайте визначимо точність та повторюваність для лінійних систем. 【Точність】 У лінійному русі існують дві загальні категорії точності – точність позиціонування та точність переміщення. П...Читати далі -
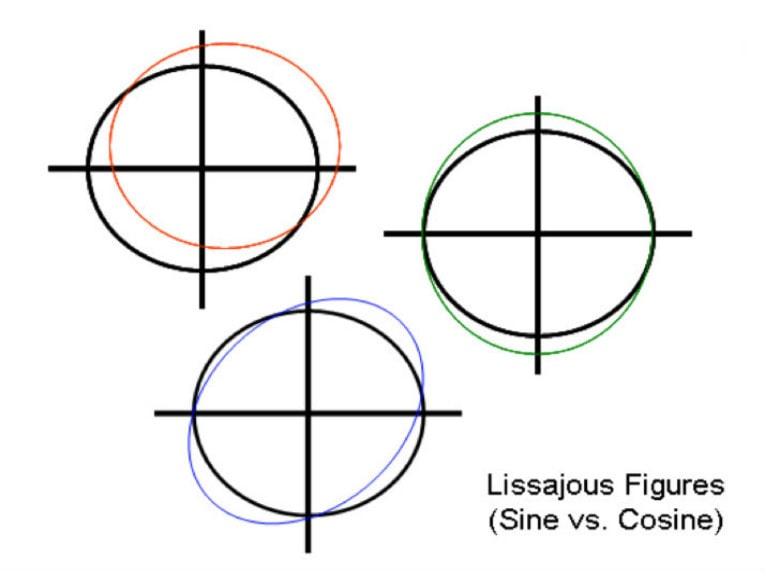
Що таке похибка підподілу (SDE) у лінійних енкодерах?
Точність інтерполяції. Щоб визначити положення лінійної осі, зчитувальна головка енкодера рухається вздовж шкали та «зчитує» зміни освітленості (для оптичних енкодерів) або магнітного поля (для магнітних типів). Коли зчитувальна головка реєструє ці зміни, вона генерує синусоїдальні та косинусоїдальні сигнали, які...Читати далі -

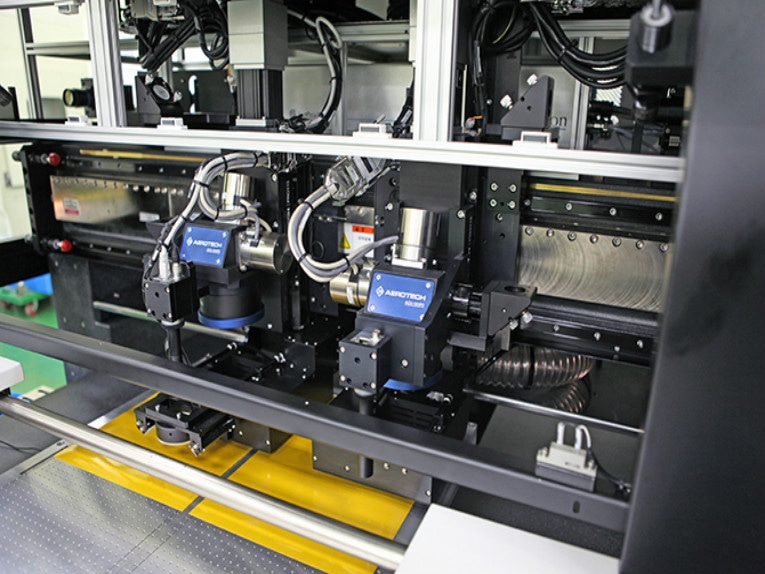
Лінійні системи для нанопозиціонування
П'єзоелектричні приводи, приводи зі звуковою котушкою, каскади лінійних двигунів. Коли ми говоримо про лінійний рух, ми зазвичай обговорюємо застосування, де відстань переміщення становить щонайменше кілька сотень міліметрів, а необхідне позиціонування знаходиться в діапазоні кількох десятих міліметра. А для цих вимог...Читати далі -
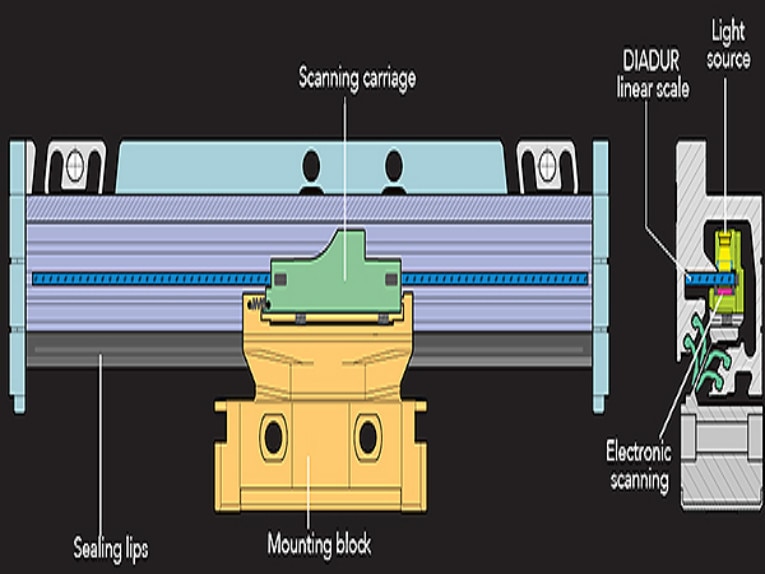
Найчастіші запитання: Які типи лінійних енкодерів існують і як їх вибрати?
Абсолютні або інкрементальні, оптичні або магнітні. Лінійні енкодери контролюють лінійний рух і забезпечують зворотний зв'язок щодо положення у вигляді електричних сигналів. У сервоприводних системах лінійні енкодери забезпечують точне положення навантаження, зазвичай на додаток до зворотного зв'язку щодо швидкості та напрямку...Читати далі -
Що робити, коли ваша система руху виходить з ладу
Кільцеве та рейкові системи на основі напрямних коліс є компактнішими та пропонують кращу точність позиціонування й більше варіантів для перевезення вантажів, ніж альтернативні конвеєрні системи для криволінійних застосувань. У постійному прагненні до зниження виробничих витрат однією з тенденцій на виробничих об'єктах є ...Читати далі -
Позиціонування платформ та порталів — нові тенденції в інтеграційних підходах
Лінійна, поворотна, XY або вертикально-підйомна платформа об'єднує двигун, привід та контролер. Існує попит на конструкції рухомих систем, що пропонують простоту або готовність до експлуатації, тому постачальники компонентів зараз здійснюють набагато більшу інтеграцію для виробників оригінального обладнання та інженерів заводів. Ніде це не є більш очевидним, ніж у...Читати далі
