







-
Правила вирівнювання приводів та напрямних у системах лінійного руху
Дотримання кількох простих рекомендацій щодо проектування систем лінійного руху може покращити продуктивність системи та термін служби приводів. Багато автоматизованих машин покладаються на компоненти лінійного напрямлення, такі як профільовані рейки, круглі рейки або інші конструкції з підшипниками кочення або ковзання, для направлення та підтримки рухомого електро...Читати далі -
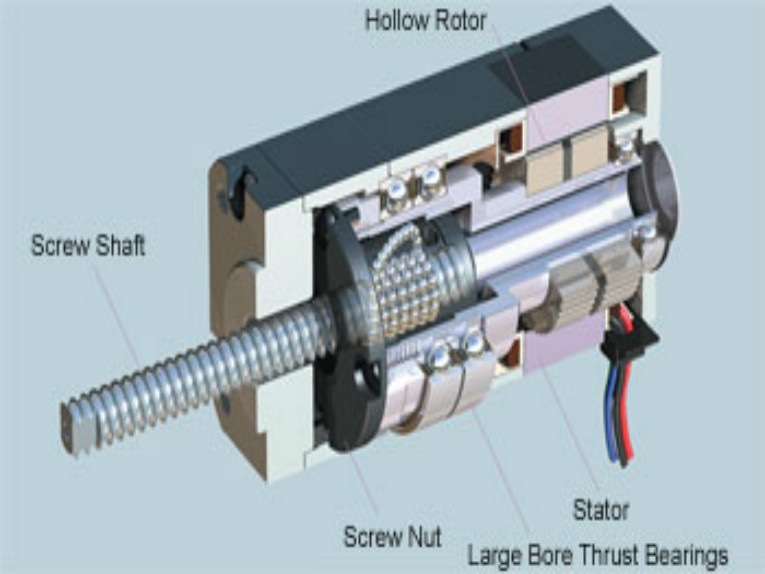
Лінійний двигун проти кульового гвинта
Економічно ефективне застосування для вашої власної розробки. Хоча безметалеві лінійні двигуни використовуються в напівпровідникових та електронних пристроях вже понад десять років, багато розробників та виробників оригінального обладнання досі розглядають їх як «нішеві» продукти. Але сприйняття лінійних двигунів як дорогого рішення для ...Читати далі -
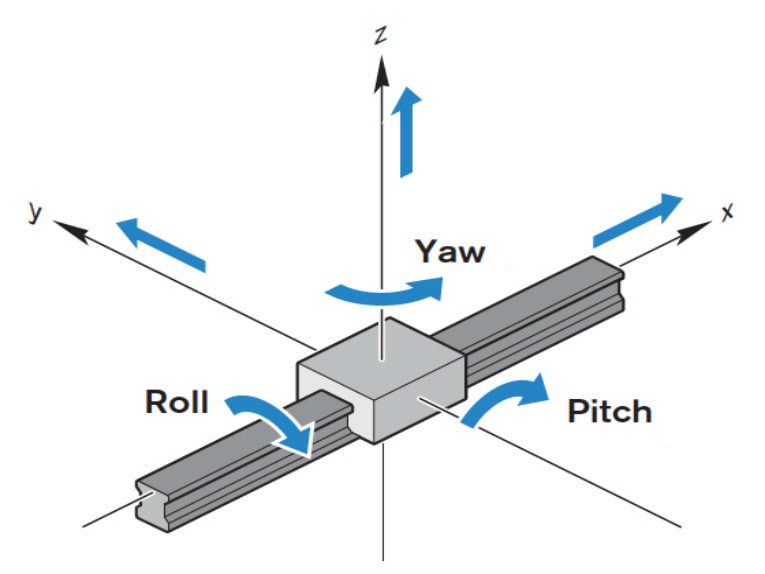
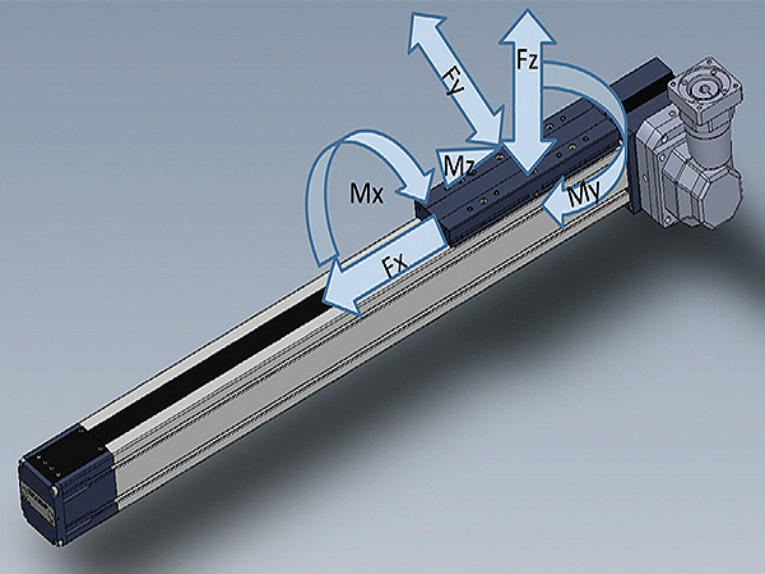
Основи руху: Як визначити крен, тангаж та риськування для лінійних систем
Включаючи декартових роботів, портальні системи та XY-столи. Лінійні напрямні та системи зазвичай піддаються як лінійним силам, що виникають через низхідні, висхідні та бічні навантаження, так і обертальним силам, що виникають через поперечні навантаження. Обертальні сили, які також називають моментними силами, зазвичай визначаються як...Читати далі -

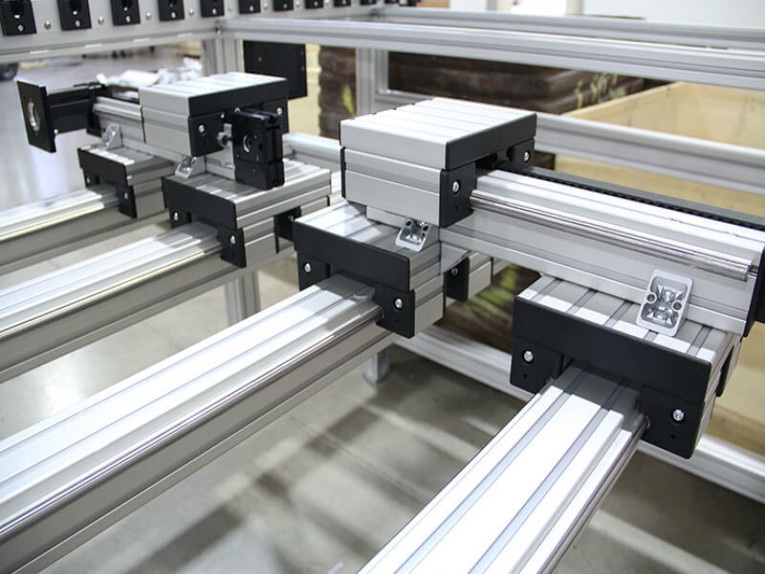
Лінійні позиціонувальні столи/платформи
Декартовий робот для портальної системи. Позиціонуючі платформи та столи використовуються в системах керування рухом для утримання заготовки та/або позиціонування її для певної операції. Платформи або столи, лінійні чи обертові, найчастіше є повними підсистемами руху. Тобто вони самі є системами руху...Читати далі -
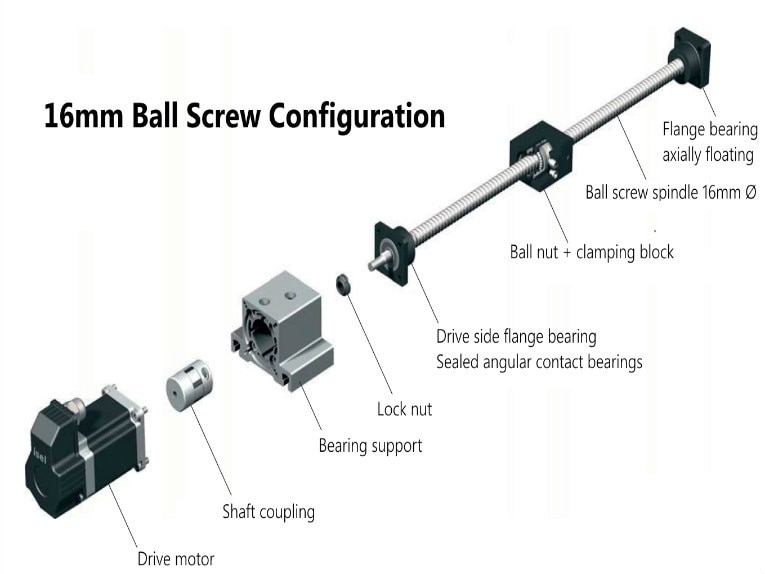
Посібник з вибору лінійних систем
Ремінний привід, кульковий гвинтовий привід, рейковий привід, привід від лінійного двигуна, пневматичний привід. Минули ті часи, коли конструкторам та виробникам машин доводилося вибирати між створенням власної лінійної системи з нуля чи обмеженим асортиментом попередньо зібраних систем, які...Читати далі -
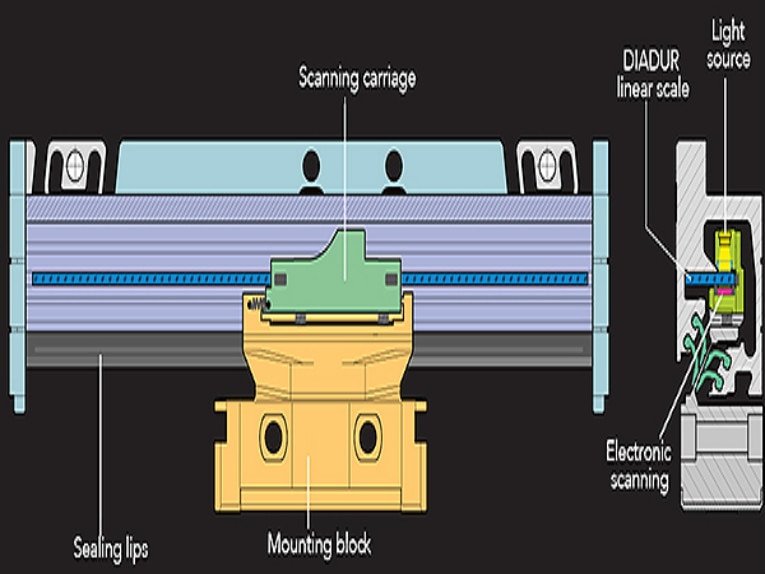
Лінійні енкодерні системи покращують точність
Лінійні енкодери підвищують точність, виправляючи помилки після механічних з'єднань. Лінійні енкодери відстежують положення осі без проміжних механічних елементів. Енкодери навіть вимірюють помилки передачі від механічних з'єднань (таких як механічні пристрої з обертово-лінійним переміщенням), що допомагає контролювати...Читати далі -
Як отримати передбачуваний та надійний лінійний рух
Точність і повторюваність, вантажопідйомність, довжина ходу, використання, навколишнє середовище, час, орієнтація, швидкості. Ось кілька порад щодо правильного визначення розміру та призначення приводу з лінійним двигуном за допомогою мнемоніки ACTUATOR — скорочення від accuracy (точність), capacity (вантажопідйомність), travel length (довжина ходу), usage (використання), ambient environment (навколишнє середовище),...Читати далі -

Горизонтальна та вертикальна лінійна платформа для позиціонування по осі Z
Сучасні платформи позиціонування можуть задовольнити конкретні та вимогливі вимоги до продуктивності. Це пояснюється тим, що індивідуальна інтеграція та новітні технології програмування руху допомагають платформам досягти неймовірної точності та синхронізації. Більше того, досягнення в галузі механічних деталей та двигунів допомагають виробникам оригінального обладнання планувати...Читати далі -
Як зменшити розмір лінійного приводу
Рішення для XY-платформ та невеликих обробних центрів, таких як 3D-принтери. Лінійні приводи бувають різних розмірів, але протягом останніх кількох років виробники роблять акцент на все більш компактних розмірах. Але незалежно від того, наскільки малий привід, додавання двигуна може зробити...Читати далі -
Оновлення тенденцій руху: етапи позиціонування ведуть до прагматичного дизайну
Основні досягнення в галузі руху за останнє десятиліття відбулися в системах керування та електроніці. Сучасні платформи позиціонування можуть задовольнити конкретні та вимогливі вимоги до вихідних даних. Це пояснюється тим, що індивідуальна інтеграція та новітні технології програмування руху допомагають платформам досягти неймовірної точності...Читати далі -

Як вибрати точність лінійної направляючої
Міркування щодо монтажу, Один блок на одній рейці, Кілька блоків на одній рейці, Кілька підшипників на кількох рейках. Вибираючи рециркуляційну лінійну напрямну, необхідно враховувати кілька критеріїв, включаючи розмір, попереднє навантаження та точність. І хоча термін «точність» ...Читати далі -
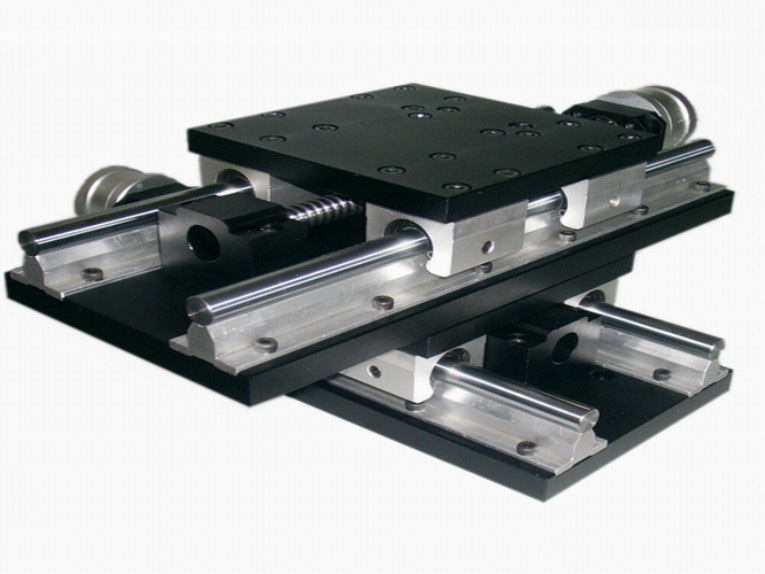
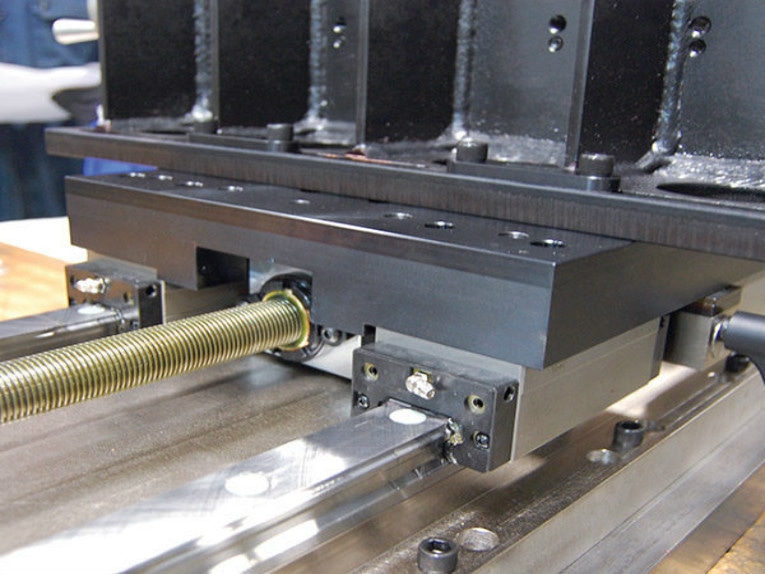
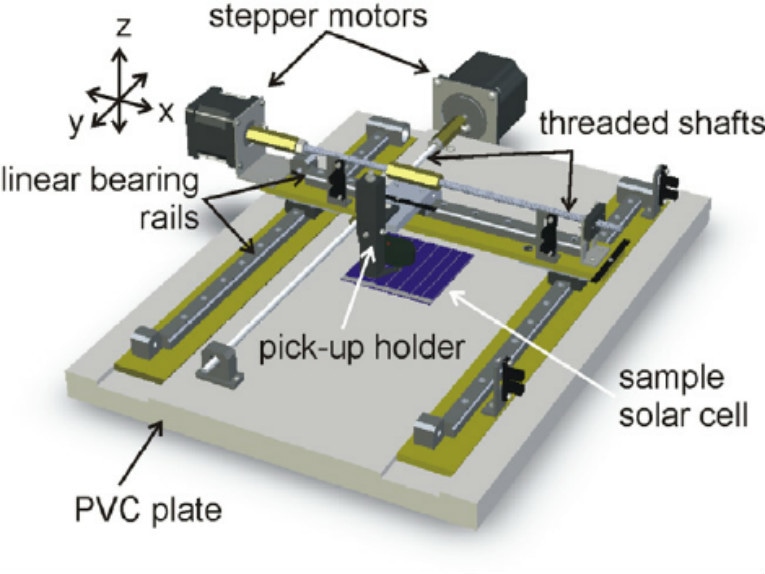
XY-таблиці: чим вони відрізняються від декартових та портальних систем?
У поширеній конструкції столу XY використовуються схрещені роликові напрямні та кульковий гвинтовий привід для дуже високої точності переміщення та позиціонування. Існує багато способів побудови лінійних систем для руху в напрямках X, Y та/або Z – також відомих як декартові координати. Терміни, які ми зазвичай використовуємо для позначення цих ...Читати далі
