







-

Електричний лінійний привід з тяговим навантаженням 1800 Н та точністю положення 0,2 мм
Двигун постійного струму Тиха конструкція, вирішує проблему шуму під час роботи патера. Металева шестерня Порошкова металургія, шестерня з чистого металу, надвисока міцність, подвійна жорсткість. Верхній та нижній кінцеві вимикачі Телескопічна штанга автоматично зупиниться, коли досягне верху або низу, щоб забезпечити...Читати далі -
5 порад щодо підтримки справності обладнання для підготовки поверхні
Ось що вам потрібно знати про технічне обслуговування, відповідальність та вибір промислових машин. До Другої світової війни машини були простими, громіздкими та повільно працюючими. Оскільки виробничі вимоги були низькими, простої машин не спричиняли значних проблем. Однак, завдяки технологічним...Читати далі -
10 переваг використання машини для збирання та розміщення
Шлях до підвищення продуктивності та якості продукції часто починається з автоматизації комплектування та розміщення. Машини комплектування та розміщення стали невід'ємною частиною сучасного виробничого середовища, пропонуючи налаштовувані способи вирішення проблем і, зрештою, збільшення прибутку компаній. Ось ...Читати далі -
Що робить лінійну напрямну придатною для використання за високих температур?
Металеві компоненти, пластикові компоненти, мастило, додаткові компоненти та аксесуари. Для більшості рециркуляційних кулькових та роликових лінійних напрямних допустимий діапазон робочих температур становить від -10° до 80° C, а деякі конфігурації розраховані на короткі періоди до 100° C. Але не всі застосування підходять...Читати далі -
Як зменшити вплив стикування (прилипання-ковзання) в лінійних напрямних
Що викликає стискання? Як його зменшити. Якщо ви не граєте на скрипці, стискання, або заїдання-ковзання, – це небажаний стан, спричинений різницею між статичним та динамічним тертям між двома поверхнями. Коли стискання виникає в лінійних напрямних, це може призвести до вібрації («ривчастого» руху), ...Читати далі -
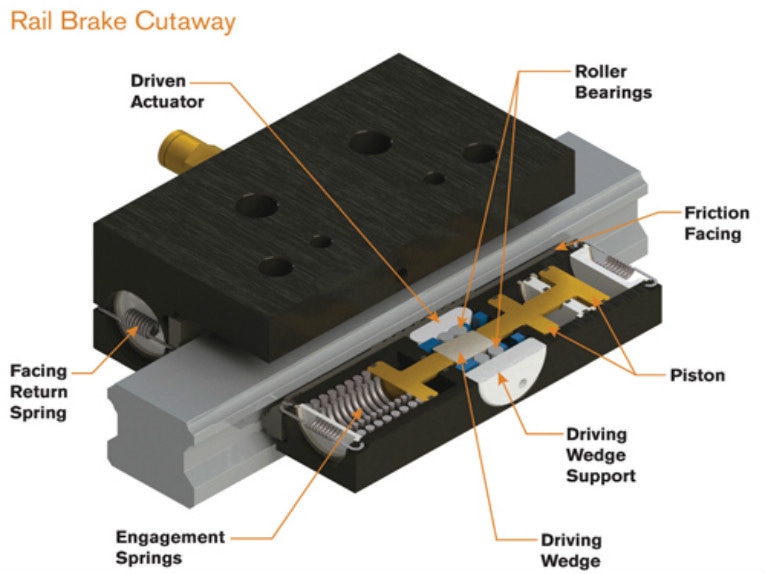
Що таке рейкові гальма та коли їх слід використовувати?
Як вибрати та застосувати рейкові гальма Серводвигуни та крокові двигуни, що керують системами лінійного руху, часто мають функцію гальмування або, у випадку крокових двигунів, фіксуючий момент, який допомагає запобігти руху двигуна (і, отже, навантаження) у вимкненому стані. Але в деяких випадках...Читати далі -

Як визначити шківи для синхронних ремінних передач
Конструкція високошвидкісної та прецизійної системи ремінного приводу. Під час проектування системи ремінного приводу першим кроком є вибір найбільш підходящого ременя для застосування. Але шківи також відіграють важливу роль у продуктивності ременя, особливо в синхронних системах ремінного приводу, де належний ...Читати далі -
Розширюючи межі лінійної точності
Прямий, точний рух далеко не простий. Прямий, точний рух далеко не простий, і пристрої лінійного позиціонування доводять це, помиляючись не в одному, а в трьох вимірах. Саме тоді, коли ви думали, що зрозуміли концепцію «лінійного руху» – влучте в потрібні точки на прямій, і...Читати далі -

Які варіанти існують для конструкцій інтегрованого двигуна та гвинта?
Зовнішня інтеграція двигуна та гвинта, інтеграція двигуна та гвинта без приєднання та інтеграція двигуна та гвинта з приєднанням. Кулькові та ходові гвинтові вузли часто приводяться в рух двигуном, з'єднаним з валом гвинта за допомогою муфти. Хоча така схема кріплення проста та зручна в обслуговуванні, додавання ...Читати далі -
Три важливі міркування щодо проектування декартових роботів
Конфігурація системи, управління кабелями, елементи керування. Якщо ваша програма вимагає декартового робота, у вас є широкий вибір варіантів, залежно від рівня інтеграції, який ви хочете здійснити. І хоча попередньо розроблені декартові роботи стають все ширшими, оскільки виробники розширюють...Читати далі -
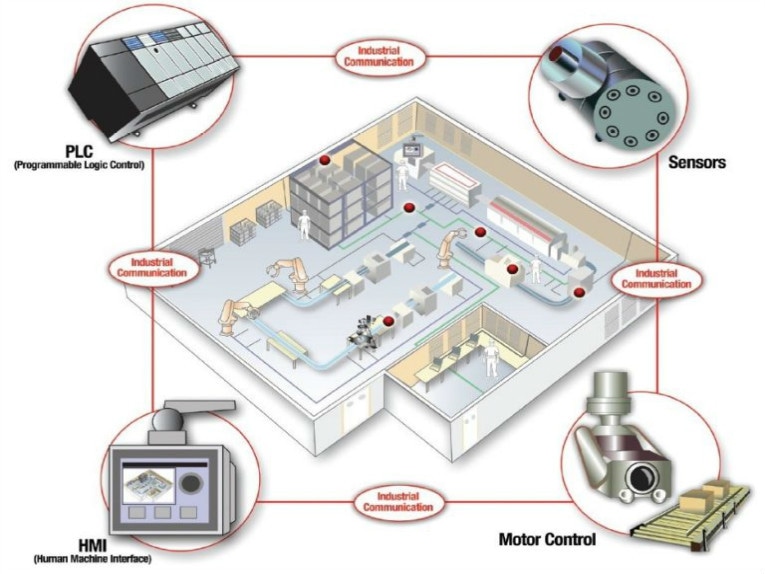
Лінійні напрямні, передача потужності, приводи. Див. неочікувані застосування.
Більша точність та легкість встановлення. Наше дослідження галузі за 2020 рік вказує на незмінну тенденцію до більшої автоматизації раніше статичних або ручно обслуговуваних систем. Ключем до цих нових пропозицій є простота встановлення для виробників оригінального обладнання та кінцевих користувачів лінійних компонентів для лінійних осей… а також...Читати далі -
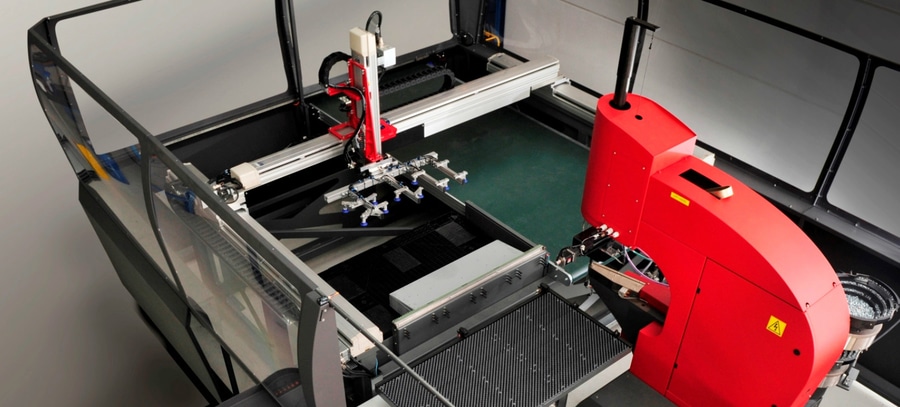
Лінійні позиціонувальні столи та столи XYZ
Декартовий робот для застосування з підбиранням та розміщенням. Позиціонуючі столи та платформи використовуються в системах керування рухом для утримання заготовки та/або позиціонування її для певної операції. Позиціонуючі столи або платформи, лінійні чи обертові, найчастіше є повними підсистемами руху. Тобто вони є системами руху...Читати далі
