







-

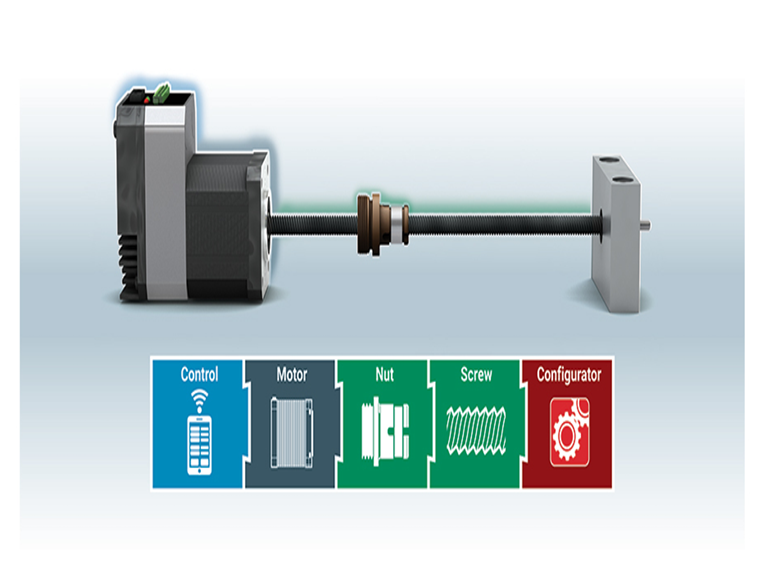
Більш точне керування лінійним рухом
Для точного автоматизованого позиціонування розгляньте лінійні приводи на основі крокових двигунів. Лінійні приводи, по суті, генерують силу та рух по прямій лінії. У типовій механічній системі вихідний вал пристрою забезпечував би лінійний рух за допомогою обертового двигуна через шестерні, ремінь та шків...Читати далі -

Які двигуни кращі: сервоприводи чи крокові двигуни?
Крокові двигуни із замкнутим циклом можуть бути найкращим вибором для завдань, які зазвичай виконуються сервоприводами, оскільки традиційні крокові двигуни не могли з ними впоратися. Одним із найважливіших рішень, яке інженери можуть прийняти під час проектування будь-якого типу процесу керування рухом, є вибір двигуна. Вибір правильного двигуна, як у ...Читати далі -
П'ять ключових факторів вибору прецизійних лінійних модулів
Готові до встановлення лінійні модулі використовуються в багатьох різних галузях промисловості для переміщення матеріалів, виробів та виробничого оснащення в найрізноманітніших машинах. Конструктори машин мають кілька варіантів на вибір під час вибору лінійних модулів, виходячи з конкретних вимог до виробництва та продуктивності...Читати далі -

Підготовка до якісного проектування машин
Яким би складним не був ваш контролер руху, він не зможе подолати погано спроектовану електромеханічну систему. Системи керування рухом складаються з трьох основних компонентів: механізму позиціонування, електроніки приводу двигуна та контролера руху. Кожен із цих компонентів слід ретельно...Читати далі -
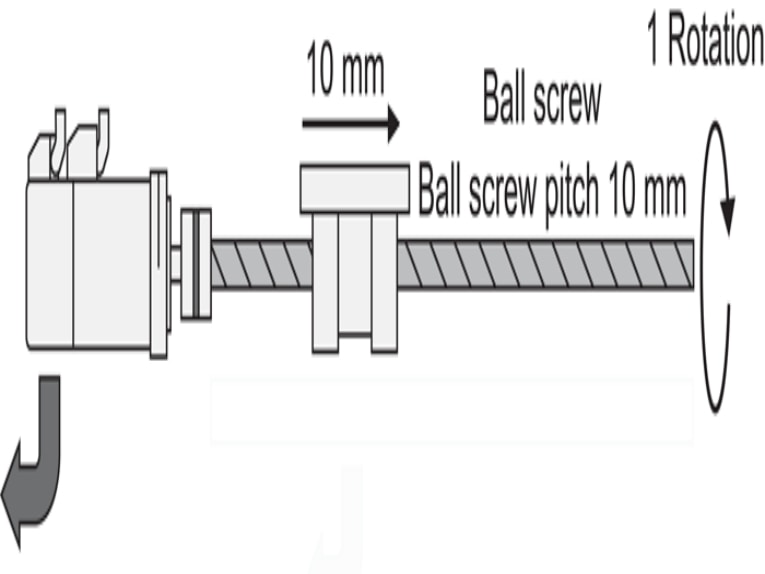
Як спроектувати систему лінійного руху
Враховуйте опори, напрямні, приводи та ущільнення під час проектування лінійної системи. Перш ніж розпочати проектування лінійної системи, визначте свої вимоги до точності, повторюваності, навантаження та навколишнього середовища. Кулькові напрямні з низьким тертям та високою жорсткістю спираються на одну (зверху) або дві (знизу) рейки. Компроміси для...Читати далі -
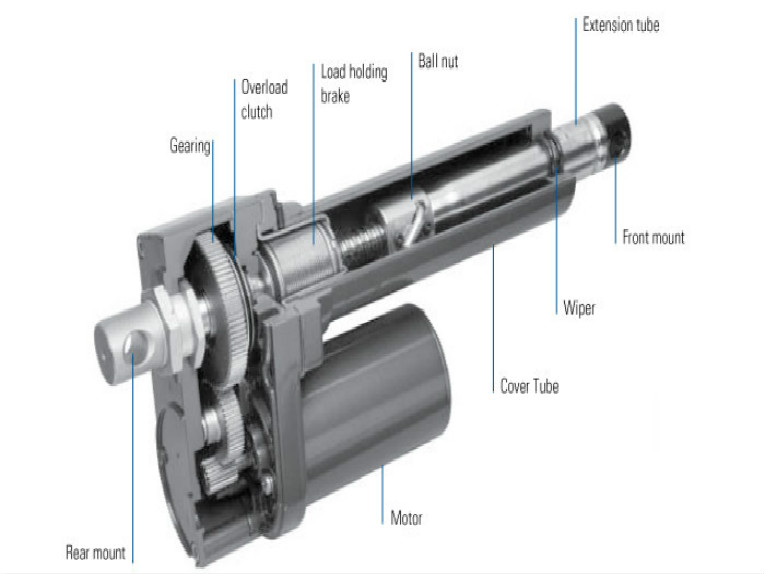
Електричні лінійні приводи: виготовляти чи купувати?
Розробка системи електричних лінійних приводів власними силами часто є найефективнішим з точки зору витрат та часу шляхом до автоматизованого рішення для руху. Іноді краще купити. Хто може краще за вас знати, що саме потрібно вашому електричному лінійному приводу? А сьогодні ви можете придбати так багато готових...Читати далі -
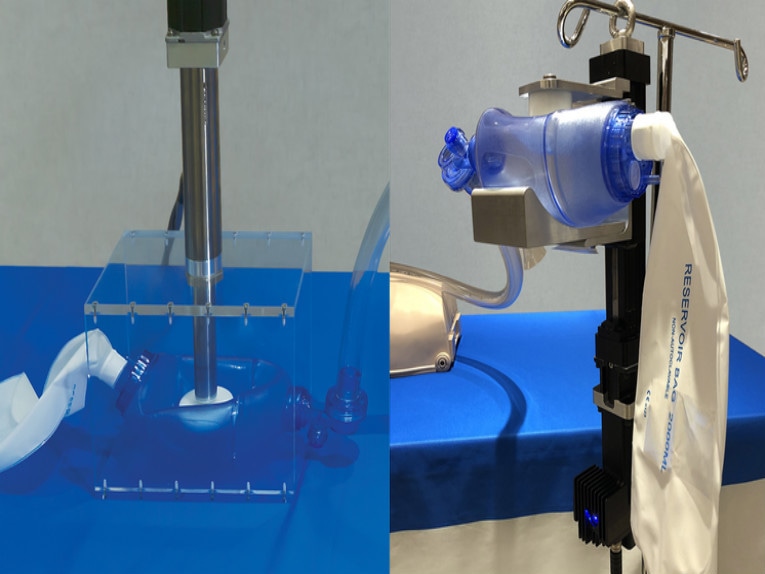
Нові прототипи вентиляторів базуються на лінійних приводах
Безпечна та ефективна доставка кисню пацієнтам. Маски з клапанним мішком, також звані мішками Амбу (штучні ручні дихальні апарати), використовуються для доставки кисню пацієнтам, які не дихають самостійно. Але хоча вони врятували багато життів, вони не дуже добре підходять для лікування пацієнтів з...Читати далі -
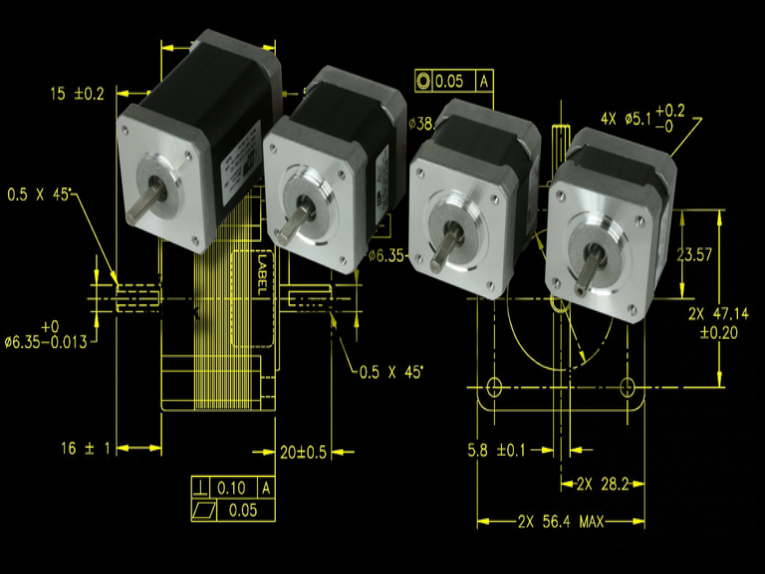
Збільшення крутного моменту крокового двигуна без збільшення розміру рами
Ключовим є додавання багатошарових роторів і статорів, але вам доведеться змиритися з фізично довшим двигуном. Крокові двигуни забезпечують точне керування положенням без необхідності зворотного зв'язку, що традиційно буває в схемах керування з розімкнутим контуром. Вал крокового двигуна зазвичай здійснює дискретні кутові рухи, по суті...Читати далі -
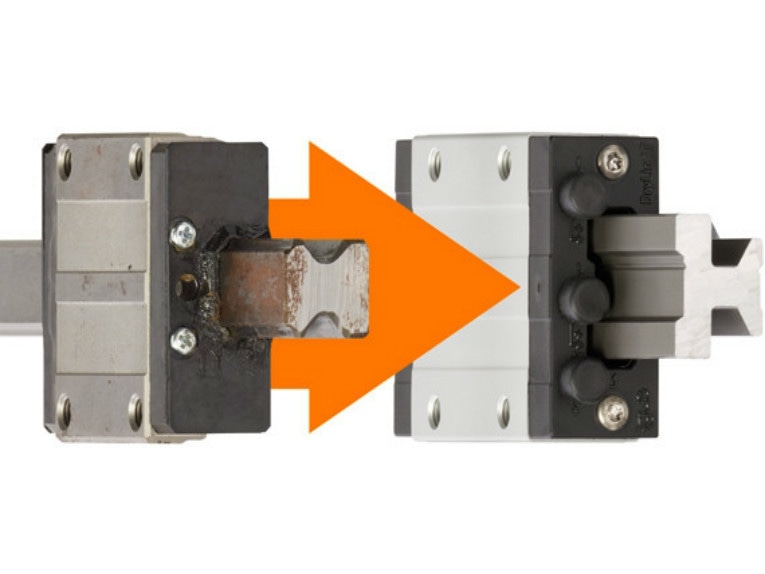
Розуміння ваших можливостей щодо корозійної стійкості
Вибір лінійних підшипників включає матеріал підшипника, покриття та джерела постачання. Корозія – це реакція окислення, яка впливає на більшість металів. У випадку сталі залізо окислюється під впливом повітря та води, утворюючи іржу, яка з часом може поступово руйнувати матеріал. Поверхні сталі...Читати далі -
Повзаючі роботи та літаючі дрони виявляють пошкоджені лопаті вітрових двигунів
Роботи, дрони та сенсори допомагають з перевірками зараз і можуть бути повністю автоматизовані в недалекому майбутньому. Дрони та роботи-подорожувачі, оснащені спеціальними сканерами, можуть допомогти вітровим лопатям залишатися в експлуатації довше, що може знизити вартість вітрової енергії в той час, коли лопаті стають...Читати далі -

Вибір, придбання та програмування вашого першого промислового робота
Кілька коротких порад, як отримати максимальну віддачу від першої покупки. Роботи не розчаровують. Після того, як виробнича компанія купує свою першу промислову робототехнічну установку, вона знову і знову повертається, щоб купувати більше для подальшої автоматизації своїх заводів. З огляду на те, що роботи підвищують продуктивність, проф...Читати далі -
Основи імпульсного керування для керування рухом
Для автоматизованих машин, яким потрібні лише дві-три осі електричних приводів, імпульсні виходи можуть бути найпростішим варіантом. Використання імпульсних виходів з ПЛК – це економічно ефективний спосіб отримати простий рух. Більшість, якщо не всі, виробники ПЛК пропонують спосіб керування сервоприводами та кроковими двигунами за допомогою пульта...Читати далі
