







-
Пять шагов к линейной моторной интеграции
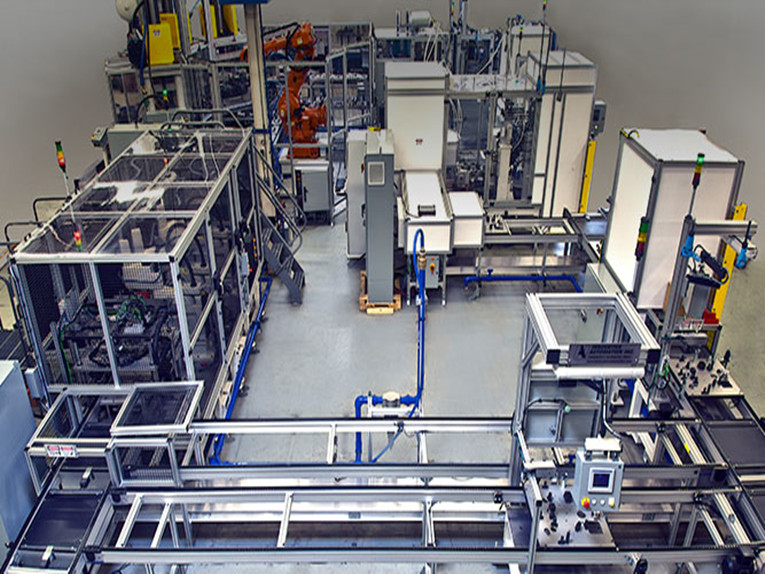
Типичная конфигурация системы перемещения. Линейное перемещение является центральным элементом многих движущихся машин, а прямой привод линейных двигателей может упростить общую конструкцию машины в таких областях применения. Другие преимущества включают повышенную жесткость, поскольку линейные двигатели крепятся непосредственно к нагрузке...Читать далее -
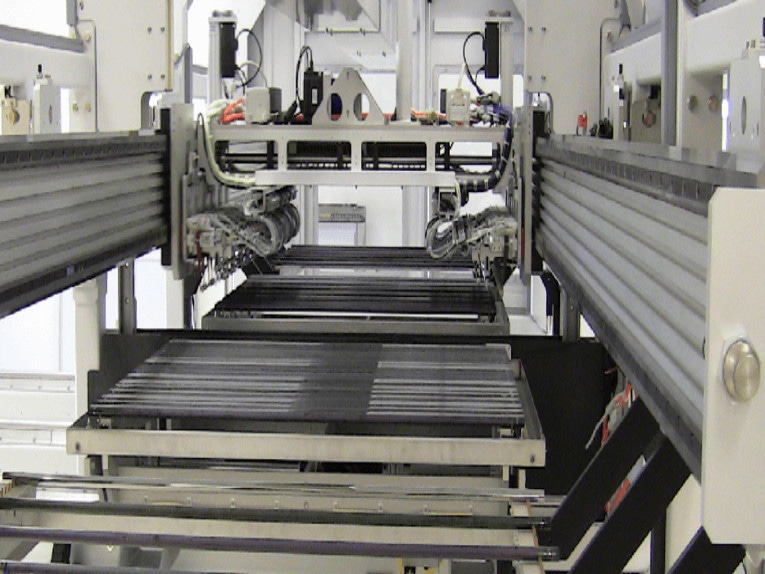
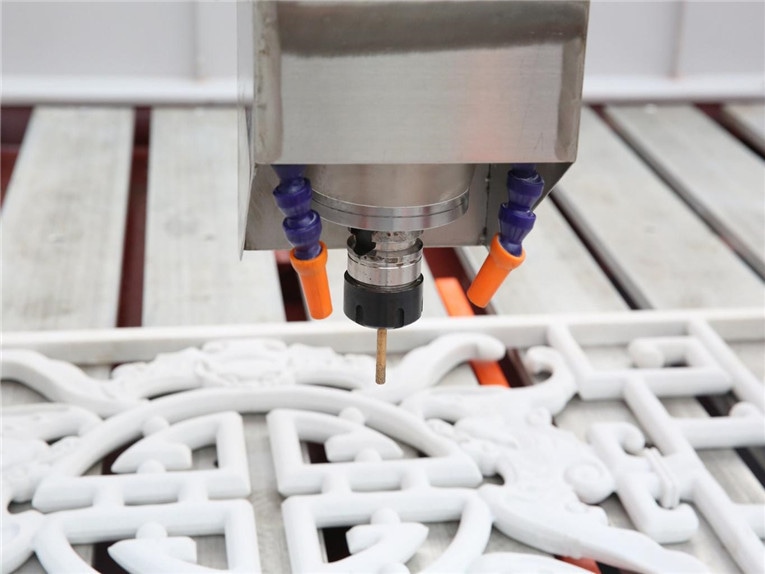
Автоматизированные лотки для линейного перемещения инструментов
Достижение высокой точности и повторяемости на производственных линиях. До недавнего времени достижение высокой точности и повторяемости на производственных линиях было сложной задачей. Но теперь новые системы автоматизации устраняют барьеры, связанные с ручной обработкой и сборкой высококачественной продукции. Здесь мы...Читать далее -
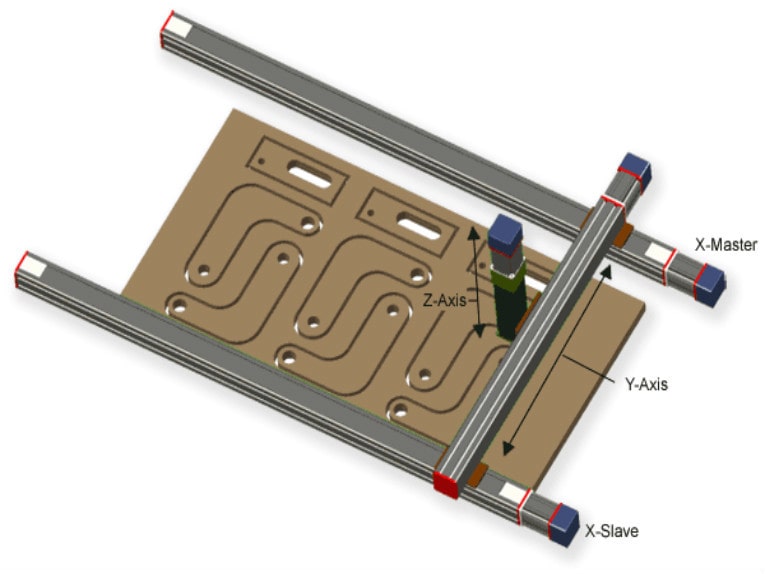
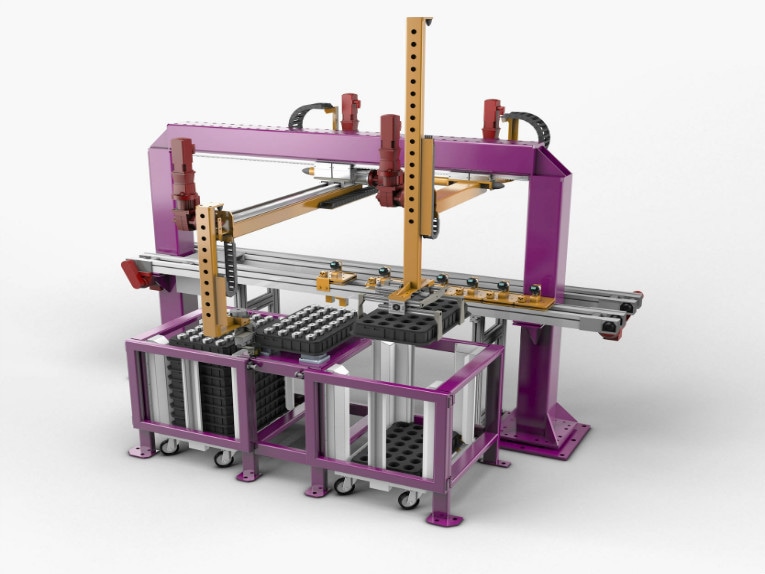
Что такое стеллажная система в портальных крановых системах?
И как этого избежать… Портальные системы отличаются от других типов многоосевых систем (таких как декартовы роботы и XY-столы) использованием двух базовых (X) осей, расположенных параллельно, с перпендикулярной (Y) осью, соединяющей их. Такое расположение двух осей X обеспечивает широкую и стабильную опорную поверхность и позволяет…Читать далее -
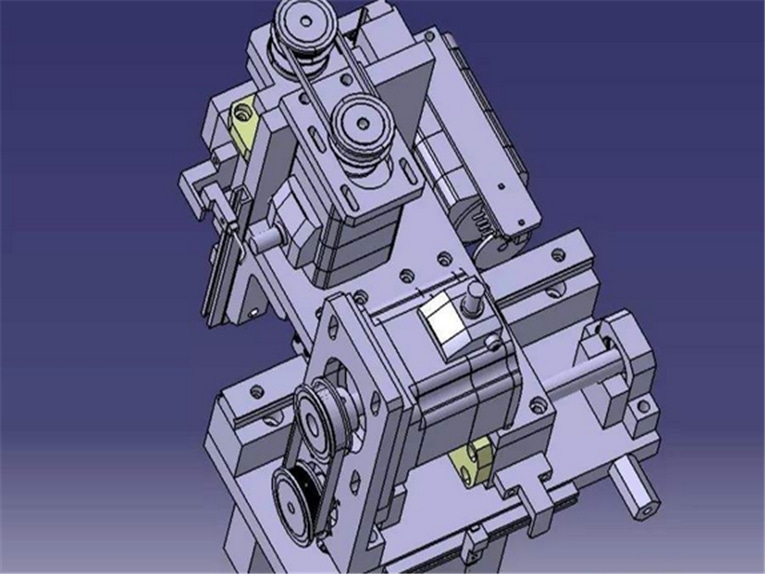
Что вызывает шум синхронного ремня и как его можно уменьшить?
Тишина означает более быструю работу и более длительный срок службы. Синхронные ремни широко распространены в системах привода, обеспечивая более плавную работу и лучшие характеристики на высоких скоростях, чем цепи, и не имеют проблем со проскальзыванием и растяжением, которые могут быть характерны для клиновых ремней в прецизионных приложениях. Но один из недостатков синхронных ремней...Читать далее -

Упростите управление несоосностью в системах линейного перемещения.
Необходимо принимать меры для предотвращения причин выхода подшипников из строя. Никто не хочет, чтобы линейный подшипник преждевременно вышел из строя. Хотя многие факторы могут угрожать ожидаемому сроку службы подшипника, конструкторы промышленных машин должны особенно тщательно следить за ошибками соосности между направляющими подшипника и движущимися элементами. Не только ошибка соосности...Читать далее -

Различные концепции привода для различных режимов работы станков.
Главные приводы. Главные приводы — это преимущественно электросинхронные и асинхронные двигатели с замкнутым контуром управления. Они применяются в качестве комплектных или корпусных двигателей в токарных, фрезерных и шлифовальных станках, а также в обрабатывающих центрах. Традиционные шпиндельные приводы с корпусными двигателями — ...Читать далее -
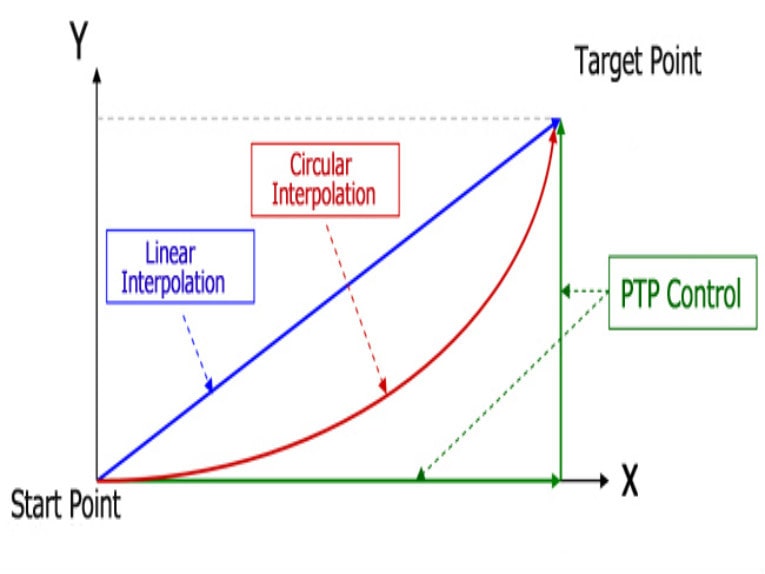
Какие типы движений можно создать с помощью многоосевых линейных систем?
Перемещение от точки к точке, смешанное движение, контурное движение. Для многих задач многоосевые линейные системы — декартовы роботы, XY-столы и портальные системы — перемещаются по прямым линиям для быстрого перемещения от точки к точке. Но некоторые приложения, такие как дозирование и резка, требуют, чтобы система...Читать далее -
Системы линейного перемещения: прочность определяется самым слабым звеном.
Рассмотрим пять звеньев в цепочке конструктивных элементов, имеющих решающее значение для точной работы. Прочность системы линейного перемещения определяется прочностью наиболее уязвимых звеньев в ее цепочке механических и электромеханических элементов. Понимание каждого компонента и его особенности (и их влияния на конечный результат) улучшает...Читать далее -
6 вещей, которые мелким производителям нужно знать о декартовых роботах
Нагрузка, точность, ход, контроллер, привод и поставщик. 1. Они справляются с более тяжелыми грузами — полезная нагрузка в 20 кг не представляет проблемы для декартова робота, что позволяет экономить средства за счет уменьшения размеров механических узлов, использования более мелких компонентов и менее сложных систем управления. 2. Они подходят для сложных ориентаций — декартов робот...Читать далее -
Выполнение тяжёлой работы: когда декартовы роботы наиболее целесообразны
Подойдет ли робот размера «Терминатор»? По сравнению с декартовым роботом, система SCARA или шестиосевая система, как правило, обеспечивают более высокую производительность «из коробки», но при этом стоят дороже и требуют более сложного программирования, однако занимают меньше места, весят меньше и имеют менее жесткую конструкцию манипулятора. С другой стороны, ...Читать далее -

Какие основные типы линейных актуаторов существуют?
Ременный привод/Винтовой привод/Пневматический привод/Реечный привод/Линейный двигатель 【Ременные и винтовые приводы】 Хотя ременные и винтовые приводы — это разные технологии, их целесообразно отнести к одной категории, поскольку это два наиболее распространенных типа электромеханических приводов...Читать далее -

В чём разница между последовательной и параллельной кинематикой в проектировании многоосевых систем перемещения?
Мы решаем проблему позиционирования. Современные позиционирующие столы и платформы включают в себя аппаратное и программное обеспечение, которое как никогда ранее адаптировано для удовлетворения конкретных требований к выходным данным. Это создано для систем перемещения, которые обеспечивают точное выполнение даже сложных многоосевых команд. Точная подача...Читать далее
