







-
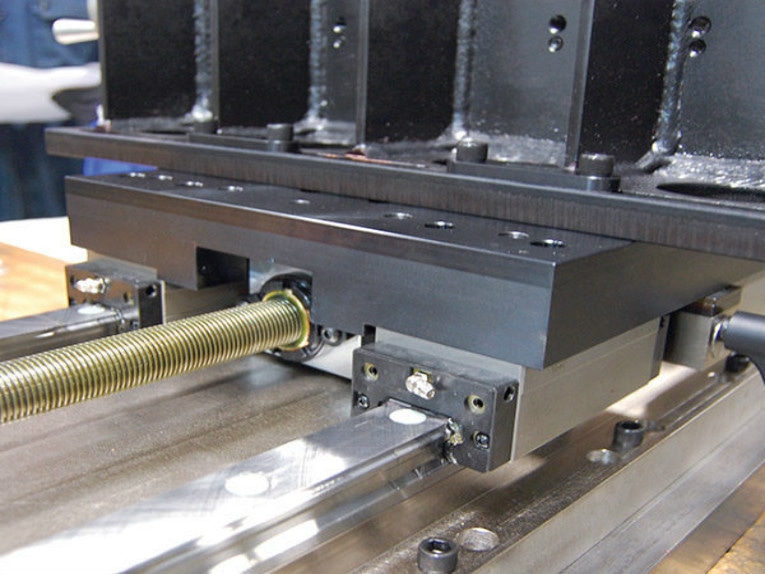
Правила выравнивания привода и направляющей в системах линейного перемещения
Следование нескольким простым рекомендациям по проектированию систем линейного перемещения может улучшить производительность системы и продлить срок службы приводов. Многие автоматизированные машины используют линейные направляющие компоненты, такие как профилированные рельсы, круглые рельсы или другие конструкции с роликовыми или скользящими подшипниками, для направления и поддержки движущихся элементов...Читать далее -
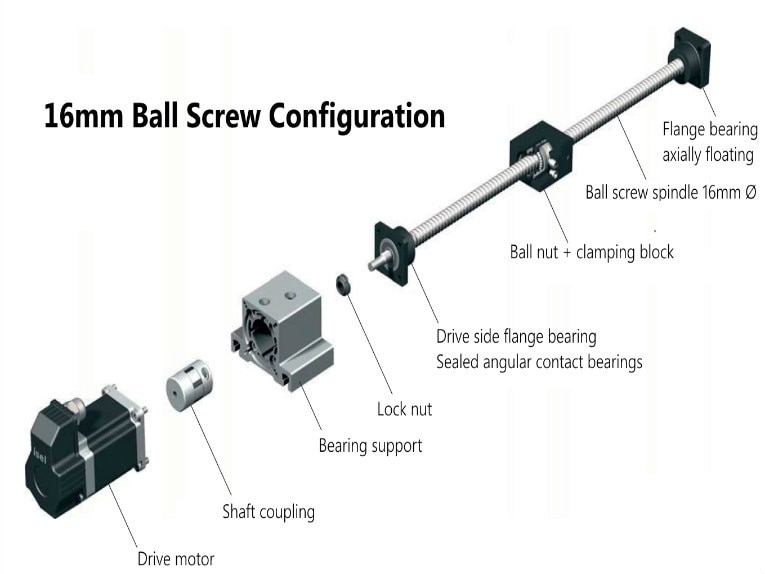
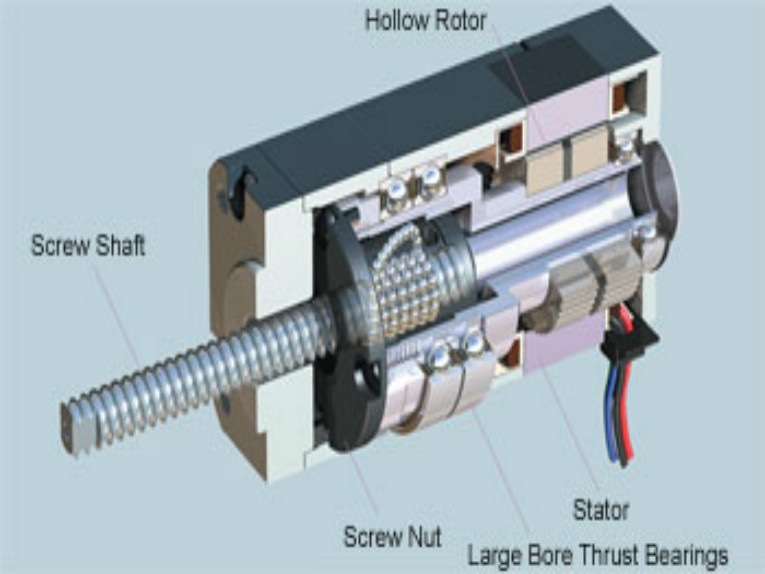
Линейный двигатель против шариковинтовой передачи
Экономически эффективное решение для вашей собственной разработки. Хотя безжелезные линейные двигатели используются в полупроводниковой и электронной промышленности уже более десяти лет, многие разработчики и производители оригинального оборудования до сих пор рассматривают их как «нишевые» продукты. Однако восприятие линейных двигателей как дорогостоящего решения для…Читать далее -
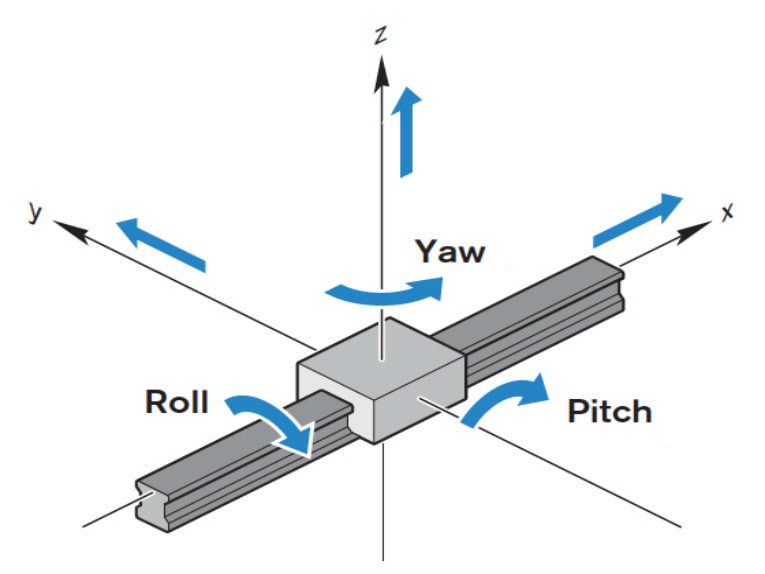
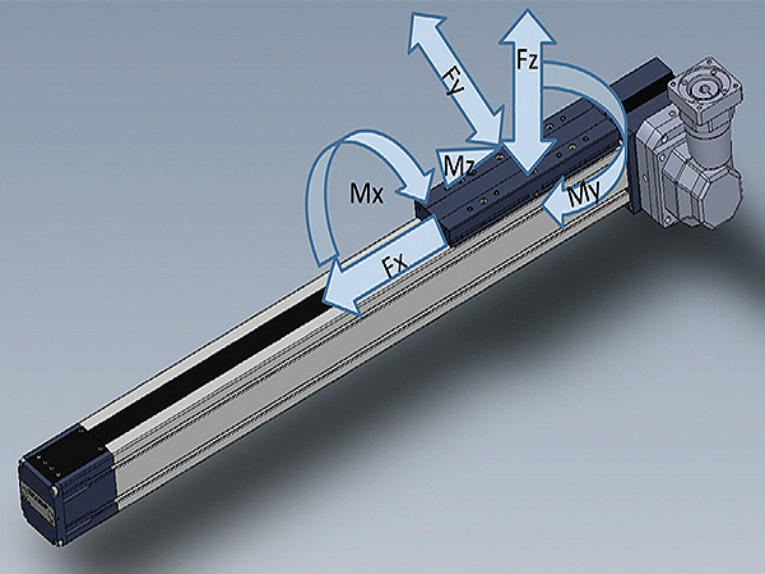
Основы движения: как определить крен, тангаж и рыскание для линейных систем.
Включая декартовы роботы, портальные системы и XY-столы. Линейные направляющие и системы обычно подвергаются как линейным силам, возникающим из-за нагрузок, направленных вниз, вверх и в стороны, так и вращательным силам, возникающим из-за консольных нагрузок. Вращательные силы — также называемые моментными силами — обычно определяются как...Читать далее -

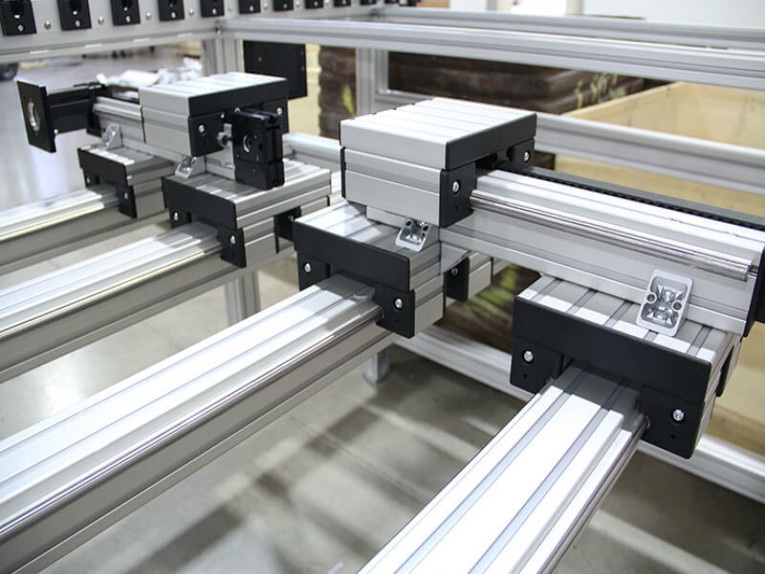
Линейные позиционирующие платформы/столы
Декартов робот для портальных систем. Позиционирующие платформы и столы используются в системах управления движением для удержания заготовки и/или ее позиционирования для выполнения какой-либо операции. Платформы или столы, как линейные, так и вращательные, чаще всего представляют собой полные подсистемы движения. То есть, они сами по себе являются системами движения...Читать далее -
Руководство по выбору линейных систем
Ременной привод, шариковинтовой привод, зубчатая передача, линейный двигатель, пневматический привод. Ушли в прошлое времена, когда конструкторам и производителям машин приходилось выбирать между созданием собственной линейной системы с нуля или довольствоваться ограниченным набором предварительно собранных систем, которые, по большому счету, были…Читать далее -
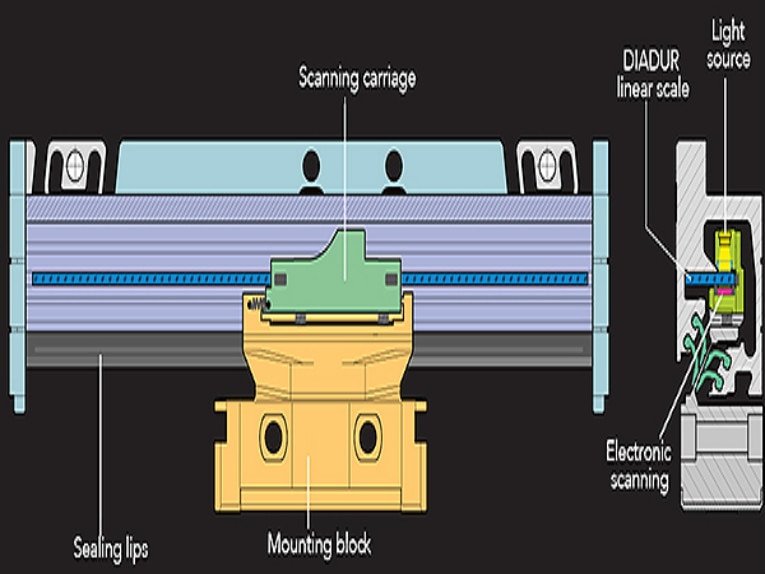
Линейные энкодеры повышают точность.
Линейные энкодеры повышают точность, исправляя ошибки, возникающие после механических соединений. Линейные энкодеры отслеживают положение осей без промежуточных механических элементов. Энкодеры даже измеряют ошибки передачи от механических соединений (таких как устройства, преобразующие вращательные и линейные элементы), что помогает контролировать...Читать далее -
Как добиться предсказуемого и надежного линейного движения
Точность и повторяемость, грузоподъемность, длина хода, режим работы, окружающая среда, время работы, ориентация, скорость. Вот несколько советов о том, как правильно выбрать и подобрать линейный привод с помощью мнемонического правила ACTUATOR — сокращение от accuracy (точность), capacity (грузоподъемность), travel length (длина хода), usage (режим работы), ambient environment (окружающая среда)...Читать далее -

Горизонтальная и вертикальная линейная платформа, платформа позиционирования по оси Z.
Современные позиционирующие платформы способны удовлетворять специфическим и высоким требованиям к производительности. Это стало возможным благодаря индивидуальной интеграции и новейшим технологиям программирования движения, которые позволяют платформам достигать невероятной точности и синхронизации. Более того, достижения в области механических компонентов и двигателей помогают производителям оборудования планировать...Читать далее -
Как уменьшить размеры линейного актуатора
Решение для XY-позиционеров и небольших обрабатывающих центров, таких как 3D-принтеры. Линейные актуаторы выпускаются в широком диапазоне размеров, но в последние несколько лет производители все больше и больше делают упор на компактность. Но независимо от размера актуатора, добавление двигателя может значительно улучшить его характеристики…Читать далее -
Обновление трендов в области анимации: Этапы позиционирования выводят дизайн на новый, более прагматичный уровень.
Основные достижения в области управления движением за последнее десятилетие произошли в системах управления и электронике. Современные позиционирующие платформы способны удовлетворять специфическим и высоким требованиям к производительности. Это стало возможным благодаря индивидуальной интеграции и новейшим технологиям программирования движения, которые позволяют платформам достигать невероятной точности...Читать далее -

Как выбрать точность линейной направляющей
Вопросы монтажа: один блок на одной направляющей, несколько блоков на одной направляющей, несколько подшипников на нескольких направляющих. При выборе рециркуляционной линейной направляющей необходимо учитывать несколько критериев, включая размер, предварительную нагрузку и точность. И хотя термин «точность»…Читать далее -
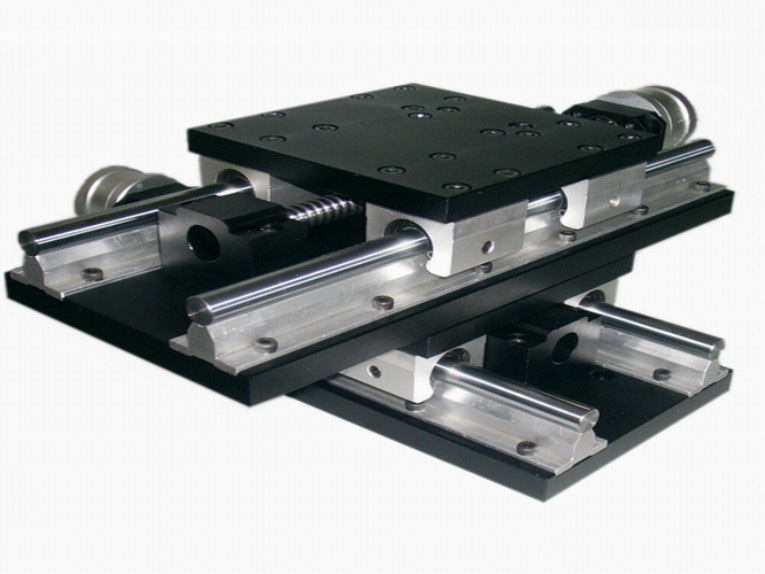
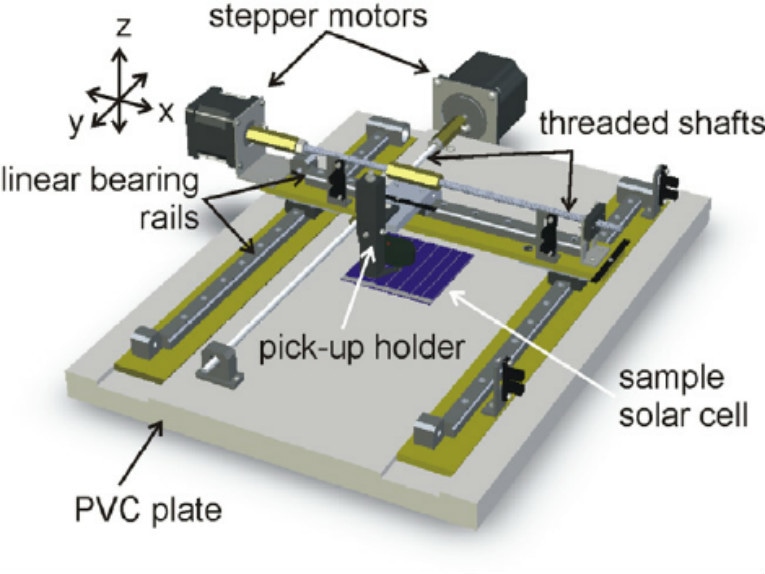
XY-столы: чем они отличаются от декартовых и портальных систем?
В типичной конструкции стола XY используются скрещенные роликовые направляющие и шариковинтовая передача для обеспечения очень высокой точности перемещения и позиционирования. Существует множество способов построения линейных систем для перемещения в направлениях X, Y и/или Z — также известных как декартовы координаты. Термины, которые мы обычно используем для обозначения этих систем...Читать далее
