







-

Электрический линейный актуатор с осевой нагрузкой 1800 Н и точностью позиционирования 0,2 мм.
Бесшумная конструкция двигателя постоянного тока решает проблему шума во время работы клюшки. Металлические шестерни: порошковая металлургия, шестерни из чистого металла, сверхвысокая прочность, вдвое большая износостойкость. Верхний и нижний концевые выключатели: телескопическая штанга автоматически останавливается при достижении верхнего или нижнего положения, обеспечивая...Читать далее -
5 советов по поддержанию оборудования для подготовки поверхности в исправном состоянии
Вот что вам нужно знать о техническом обслуживании, ответственности и выборе промышленного оборудования. До Второй мировой войны машины были простыми, громоздкими и медленно работающими. Поскольку производственные потребности были низкими, простои оборудования не вызывали значительных проблем. Однако с развитием технологий...Читать далее -
10 преимуществ использования машины для установки и перемещения компонентов.
Путь к повышению производительности и качества продукции часто начинается с автоматизации операций по захвату и перемещению деталей. Эти машины стали неотъемлемой частью современного производственного процесса, предлагая настраиваемые решения проблем и, в конечном итоге, повышая прибыльность компаний. Вот некоторые из них…Читать далее -
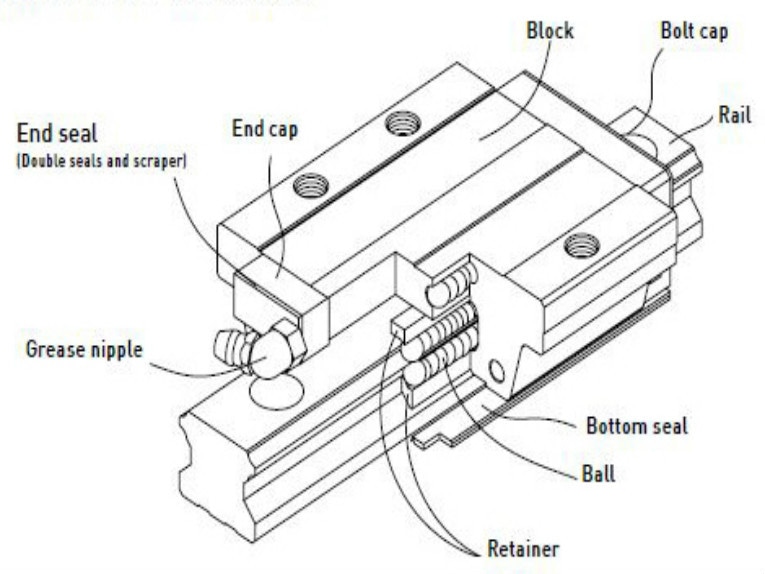
Почему линейный направляющий элемент подходит для использования при высоких температурах?
Металлические компоненты, пластиковые компоненты, смазка, дополнительные компоненты и принадлежности. Для большинства линейных направляющих с шариковыми и роликовыми подшипниками допустимый диапазон рабочих температур составляет от -10° до 80°C, при этом некоторые конфигурации рассчитаны на кратковременное воздействие температур до 100°C. Однако не все области применения подходят для таких направляющих...Читать далее -
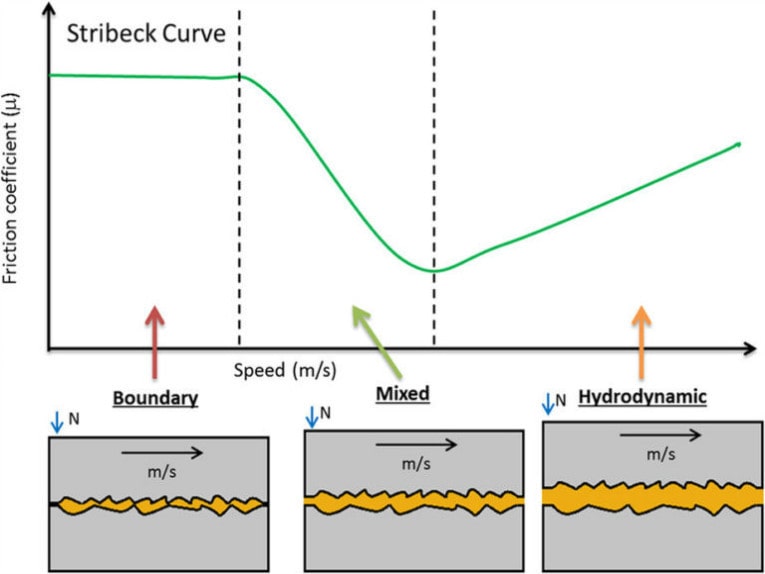
Как уменьшить эффект залипания (скольжения) в линейных направляющих
Что вызывает заедание? Как его уменьшить? Если вы не играете на скрипке, то заедание, или «скольжение-залипание», — это нежелательное явление, вызванное разницей между статическим и динамическим трением между двумя поверхностями. Когда заедание возникает в линейных направляющих, это может привести к дребезжанию («рывковому» движению)...Читать далее -
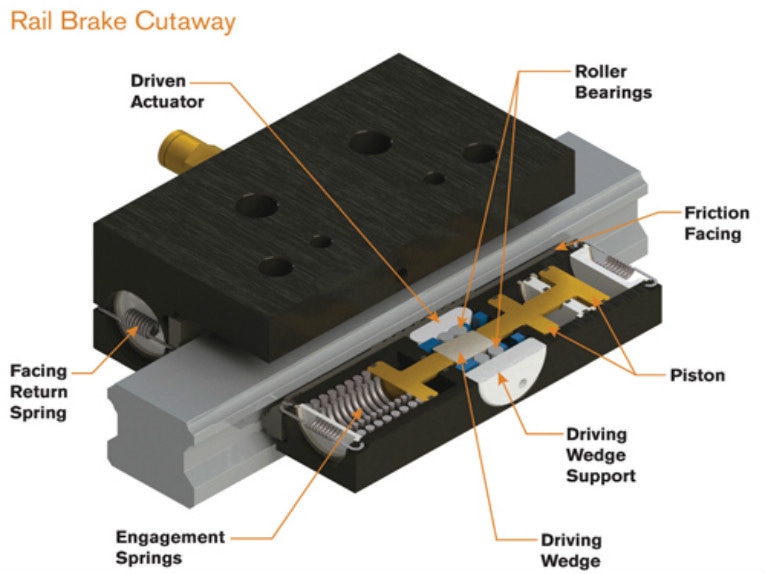
Что такое рельсовые тормоза и когда их следует использовать?
Как выбрать и установить рельсовые тормоза. Серво- и шаговые двигатели, приводящие в движение системы линейного перемещения, часто имеют функцию торможения или, в случае шаговых двигателей, момент фиксации, который помогает предотвратить движение двигателя (и, следовательно, груза) при выключенном питании. Но в некоторых случаях...Читать далее -

Как выбрать шкивы для синхронных ременных передач
Проектирование высокоскоростных и высокоточных систем с ременным приводом. При проектировании системы с ременным приводом первым шагом является выбор наиболее подходящего ремня для конкретного применения. Но шкивы также играют важную роль в работе ремня — особенно в синхронных системах с ременным приводом, где правильное...Читать далее -
Расширение границ линейной точности
Прямолинейное и точное перемещение — задача далеко не простая. Прямолинейное и точное перемещение — задача далеко не простая, и устройства линейного позиционирования доказывают это, допуская ошибки не в одном, а в трёх измерениях. Как раз тогда, когда вы думали, что освоили концепцию «линейного перемещения» — достигните необходимых точек на прямой, и...Читать далее -

Какие существуют варианты интегрированных конструкций двигателя и шнека?
Внешняя интеграция двигателя с винтовым валом, интеграция двигателя с винтовым валом без фиксации и интеграция двигателя с винтовым валом с фиксацией. Шариковые и ходовые винтовые узлы часто приводятся в движение двигателем, соединенным последовательно с винтовым валом через муфту. Хотя такая схема монтажа проста и удобна в обслуживании, дополнительное...Читать далее -
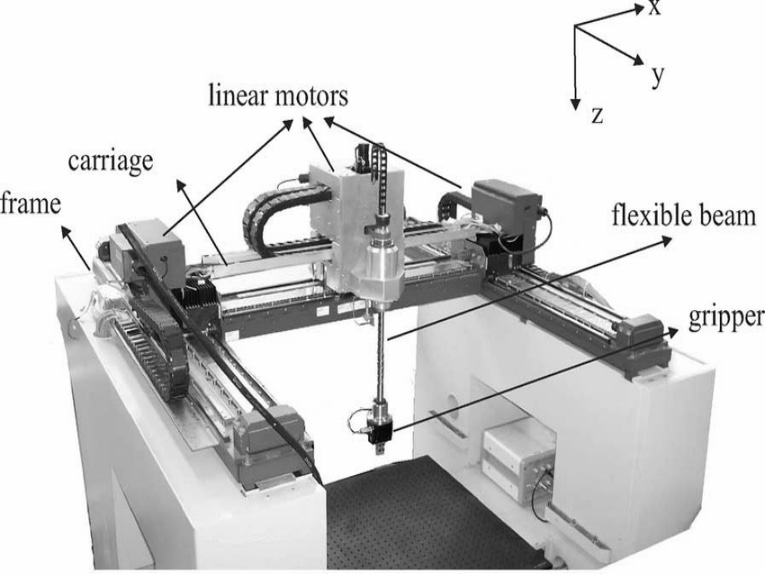
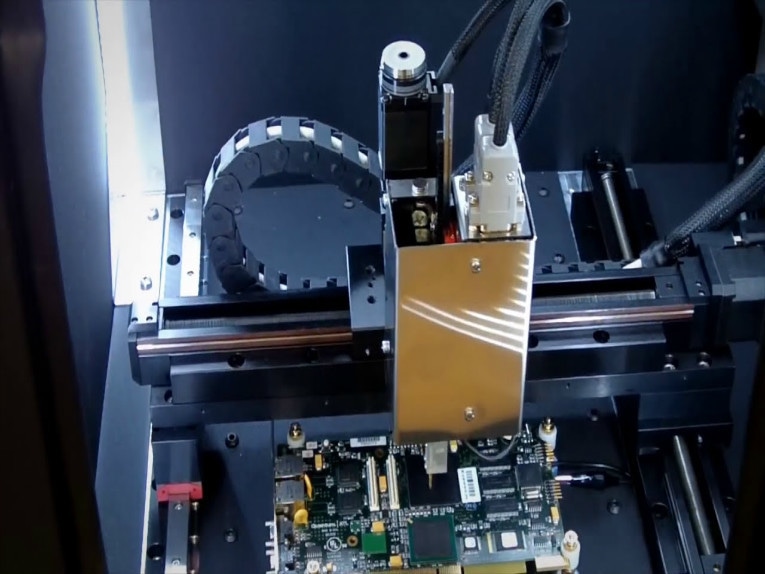
Три важных аспекта проектирования декартовых роботов.
Конфигурация системы, организация кабелей, управление. Если для вашего приложения требуется декартов робот, у вас есть широкий выбор вариантов в зависимости от уровня интеграции, который вы хотите осуществить. И хотя готовые декартовы роботы получают все большее распространение по мере расширения производства...Читать далее -
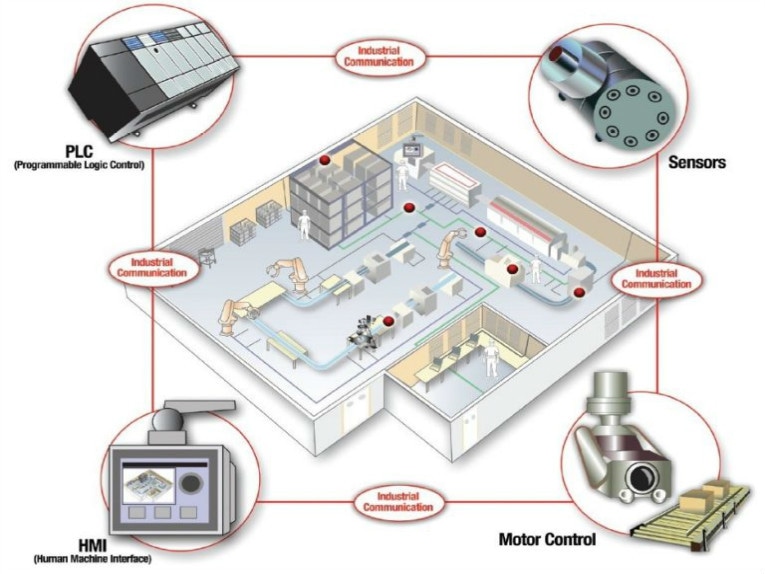
Линейные направляющие, передача энергии, исполнительные механизмы. Неожиданные области применения.
Более точная и простая установка. Наше исследование отрасли 2020 года указывает на неуклонную тенденцию к большей автоматизации ранее статичных или обслуживаемых вручную систем. Ключевым моментом этих новых предложений является простота установки для производителей оборудования и конечных пользователей линейных компонентов для линейных осей… а также…Читать далее -
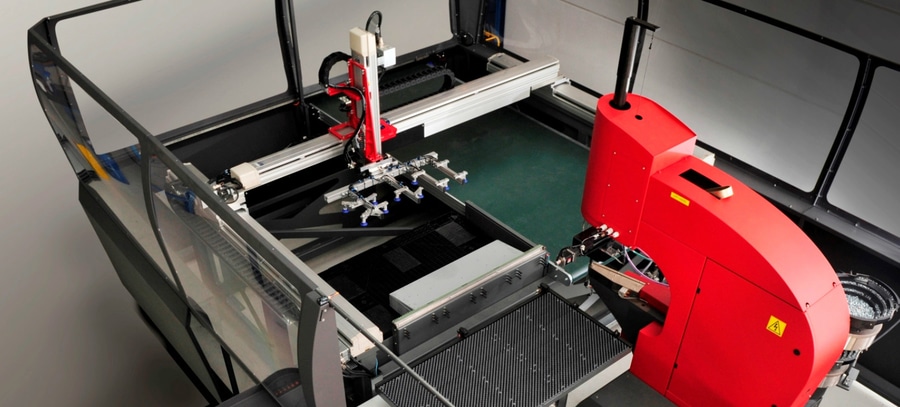
Линейные позиционирующие платформы и XYZ-столы
Декартов робот для операций захвата и перемещения. Позиционирующие платформы и столы используются в системах управления движением для удержания заготовки и/или ее позиционирования для выполнения какой-либо операции. Платформы или столы, как линейные, так и вращательные, чаще всего представляют собой полные подсистемы движения. То есть, они являются системами движения...Читать далее
