







-

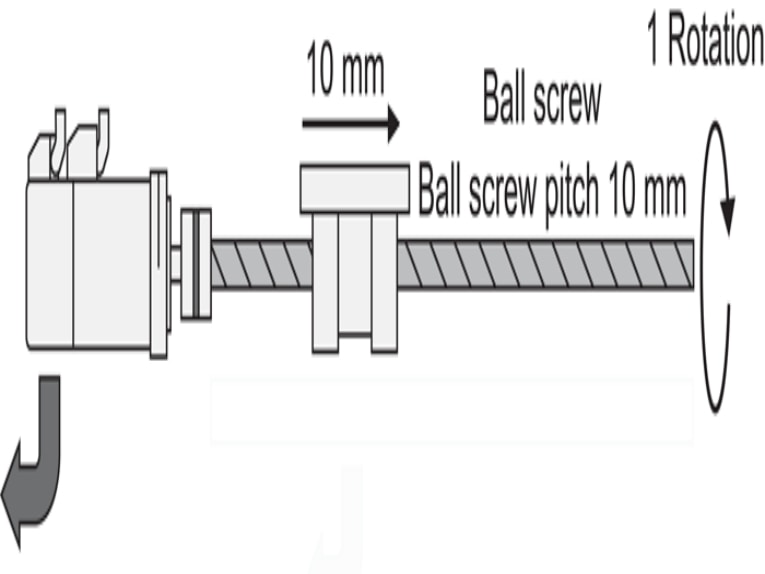
Более точное управление линейным движением
Для точного автоматизированного позиционирования можно использовать линейные актуаторы на основе шаговых двигателей. Линейные актуаторы, по сути, создают силу и движение по прямой линии. В типичной механической системе выходной вал устройства обеспечивает линейное движение с помощью вращающегося двигателя через шестерни, ремень и шкив...Читать далее -

Какие двигатели лучше: сервоприводы или шаговые двигатели?
Шаговые двигатели с замкнутым контуром управления могут быть лучшим выбором для задач, обычно выполняемых сервоприводами, поскольку традиционные шаговые двигатели с ними не справляются. Одним из наиболее важных решений, которые инженеры могут принять при проектировании любого процесса управления движением, является выбор двигателя. Правильный выбор двигателя важен как с точки зрения...Читать далее -
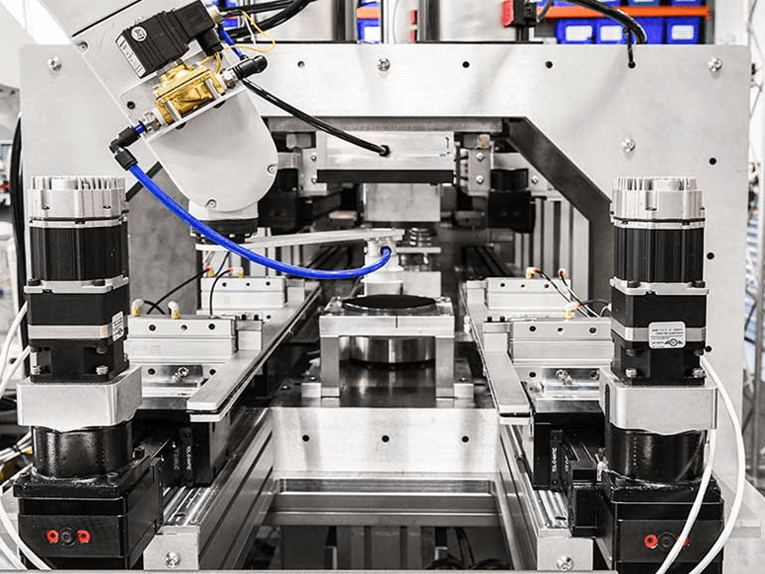
Пять ключевых факторов при выборе прецизионных линейных модулей
Готовые к установке линейные модули используются во многих отраслях промышленности для перемещения материалов, изделий и производственного оборудования в самых разнообразных машинах. Конструкторы машин имеют множество вариантов выбора линейных модулей, исходя из конкретных производственных и эксплуатационных требований...Читать далее -

Подготовка к качественному проектированию машин
Каким бы сложным ни был ваш контроллер движения, он не сможет компенсировать плохо спроектированную электромеханическую систему. Системы управления движением состоят из трех основных компонентов: механизма позиционирования, электроники управления двигателем и контроллера движения. Каждый из этих компонентов должен быть тщательно...Читать далее -
Как спроектировать систему линейного перемещения
При проектировании линейной системы учитывайте опоры, направляющие, приводы и уплотнения. Перед началом проектирования линейной системы определите требования к точности, повторяемости, нагрузке и условиям окружающей среды. Шариковые направляющие с низким коэффициентом трения и высокой жесткостью опираются на одну (верхнюю) или две (нижнюю) направляющие. Компромиссы при выборе...Читать далее -
Электрические линейные актуаторы: производить или покупать?
Разработка системы электрических линейных актуаторов собственными силами часто является наиболее экономичным и эффективным по времени способом создания автоматизированного решения для управления движением. Иногда выгоднее купить готовое решение. Кто лучше вас знает, какие именно электрические линейные актуаторы вам нужны? А сегодня можно приобрести множество готовых вариантов...Читать далее -
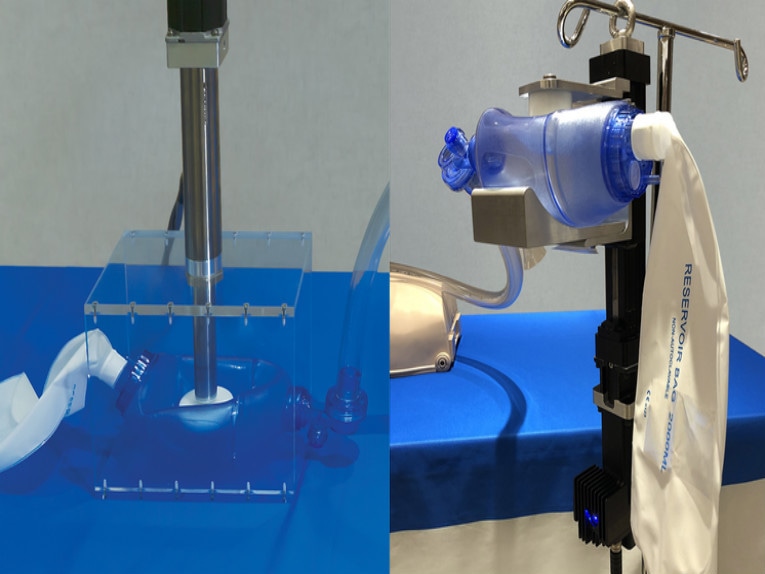
В новых прототипах аппаратов искусственной вентиляции легких используются линейные приводы.
Безопасная и эффективная подача кислорода пациентам. Мешки с клапаном, также называемые мешками Амбу (искусственные ручные дыхательные аппараты), используются для подачи кислорода пациентам, которые не дышат самостоятельно. Но хотя они спасли много жизней, они не очень подходят для лечения пациентов с...Читать далее -
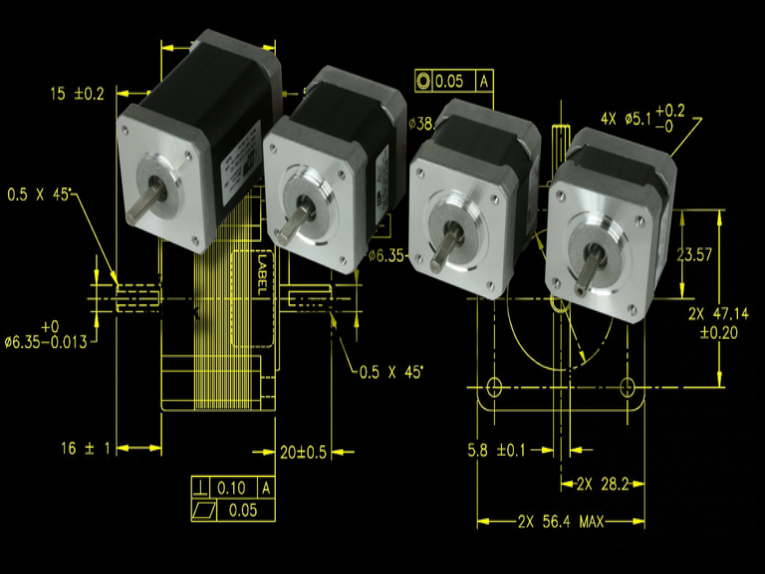
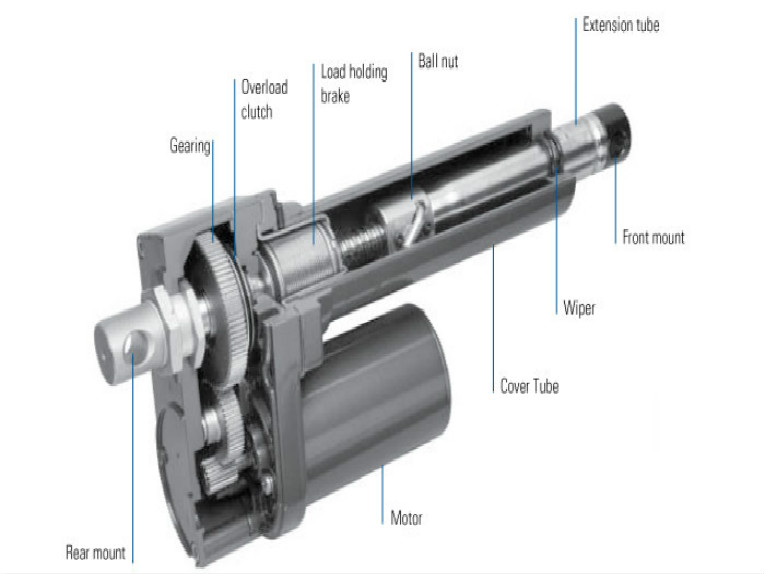
Увеличение крутящего момента шагового двигателя без увеличения габаритов корпуса.
Ключевым моментом является добавление многослойных роторов и статоров, но при этом приходится мириться с физически большей длиной двигателя. Шаговые двигатели обеспечивают точное управление положением без необходимости обратной связи, что традиционно характерно для схем управления с разомкнутым контуром. Вал шагового двигателя обычно совершает дискретные угловые перемещения, по сути...Читать далее -
Понимание ваших возможностей в области коррозионной стойкости
Выбор линейных подшипников включает в себя материал подшипника, покрытия и поставщиков. Коррозия — это реакция окисления, которая поражает большинство металлов. В случае стали железо окисляется при воздействии воздуха и воды, образуя ржавчину, которая со временем может постепенно разрушать материал. Поверхности стали...Читать далее -
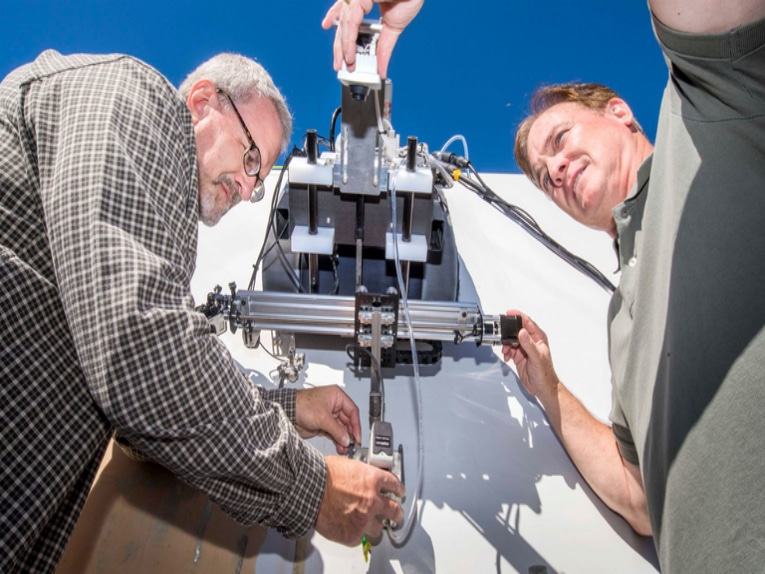
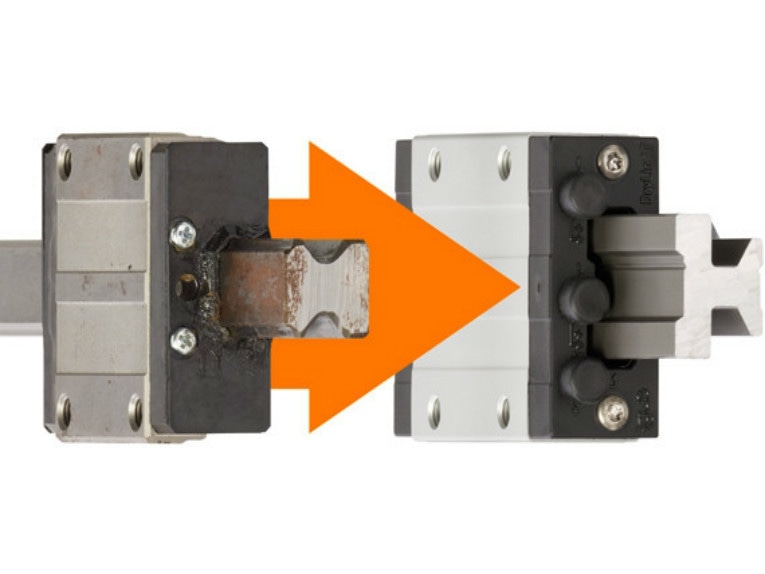
Ползающие роботы и летающие дроны обнаруживают поврежденные лопасти ветрогенератора.
Роботы, дроны и датчики помогают в проведении инспекций уже сейчас и могут быть полностью автоматизированы в недалеком будущем. Дроны и ползающие роботы, оснащенные специальными сканерами, могут помочь лопастям ветрогенераторов дольше оставаться в эксплуатации, что может снизить стоимость ветровой энергии в то время, когда лопасти...Читать далее -

Выбор, покупка и программирование вашего первого промышленного робота
Несколько кратких советов о том, как извлечь максимальную выгоду из первой покупки. Роботы не разочаровывают. После того, как производственная компания приобретает свою первую установку промышленного робота, она снова и снова возвращается к покупке новых роботов для дальнейшей автоматизации своих заводов. Учитывая, что роботы повышают производительность, профессиональные...Читать далее -
Основы управления импульсами для управления движением
Для автоматизации машин, требующих всего двух-трех осей электрических приводов, импульсные выходы могут быть самым простым решением. Использование импульсных выходов ПЛК — это экономически эффективный способ получения простого движения. Большинство, если не все, производители ПЛК предоставляют возможность управления сервоприводами и шаговыми двигателями с помощью импульсных выходов...Читать далее
