







-

Максимальное использование преимуществ индивидуальных решений по автоматизации промышленности
Жизнь производителей была бы намного проще, если бы все их процессы автоматизации были однородными. К сожалению, многие из них требуют индивидуальной настройки для удовлетворения уникальных требований автоматизированного зажима заготовок или обработки материалов. Это относится к любому приложению...Читать далее -
Что такое линейный столик?
Линейный механизм стабилизирует ось движения объекта, перемещаемого системой перемещения. Создаваемое им скользящее движение привело к тому, что некоторые называют это устройство линейной направляющей, которая является компонентом линейного перемещения механизма. Части линейного, или поступательного, механизма включают в себя платформу...Читать далее -

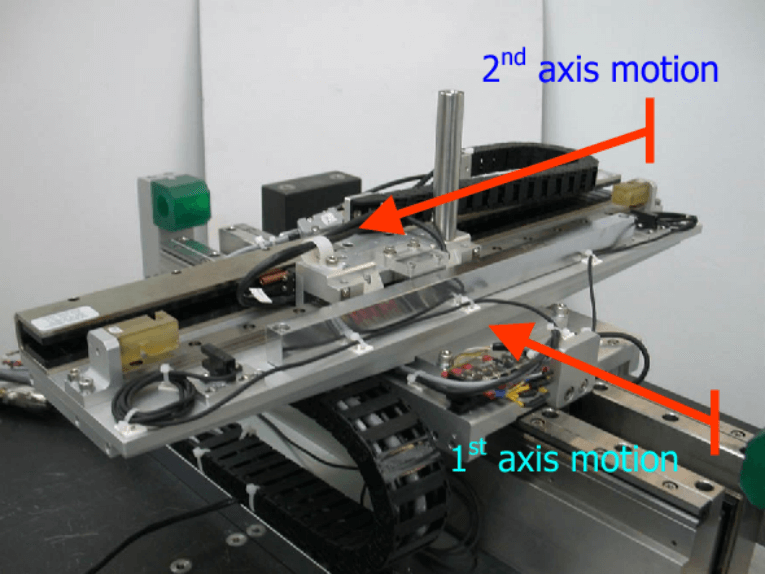
Высокоточные линейные моторные платформы для промышленной автоматизации
Высокоточные промышленные системы перемещения используются в тестировании, сборке или лазерной микрообработке высокоточных и дорогостоящих компонентов, а также в производстве электроники, оптики и фотоники, и это лишь некоторые примеры. Учитывая, что каждый современный автомобиль, продаваемый в США, оснащен как минимум одной камерой...Читать далее -
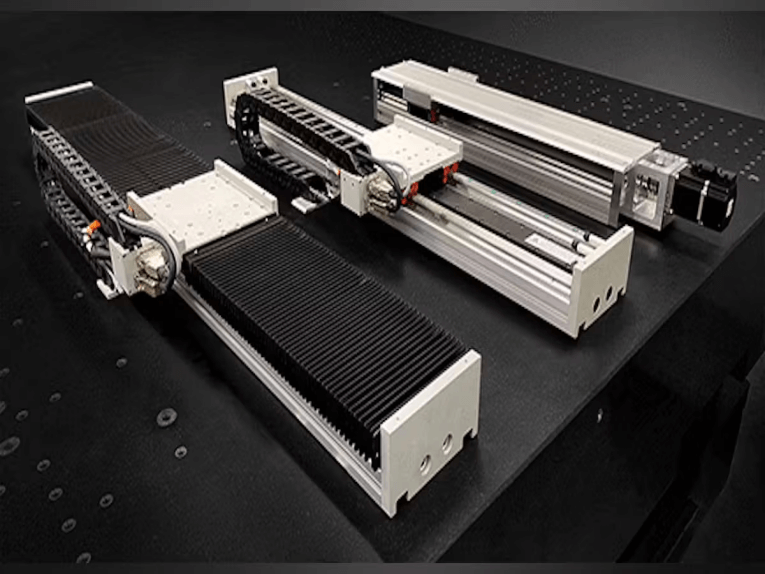
Введение в системы линейного перемещения по принципу «подключи и работай»
Если вы занимаетесь производством машин, вы, вероятно, ежедневно работаете с приводами и позиционирующими платформами. Но действительно ли вы получаете от этих устройств движения максимальную производительность или минимальные эксплуатационные расходы? Ответ может оказаться не таким, как вы ожидаете. Слишком часто инженеры рассматривают платформы или приводы просто как еще один...Читать далее -

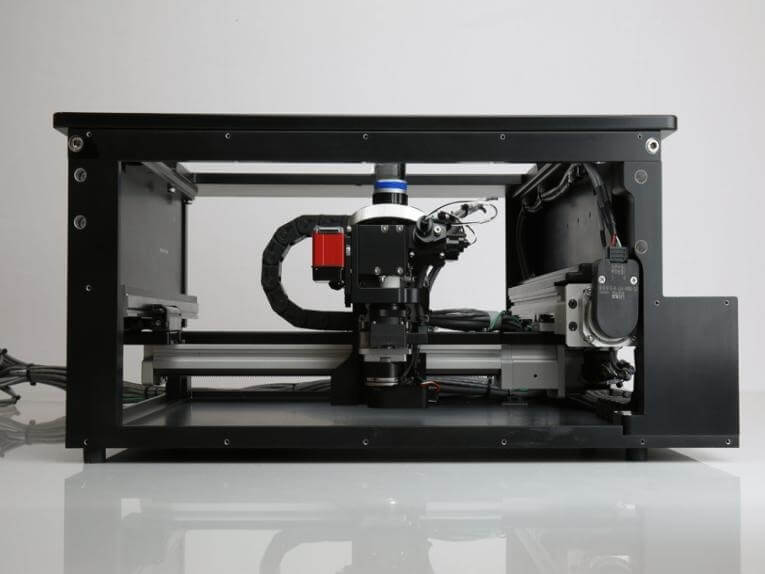
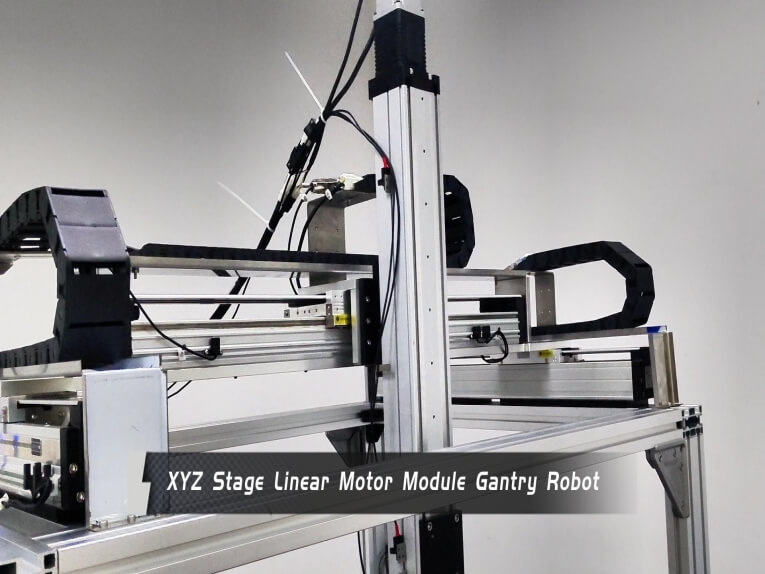
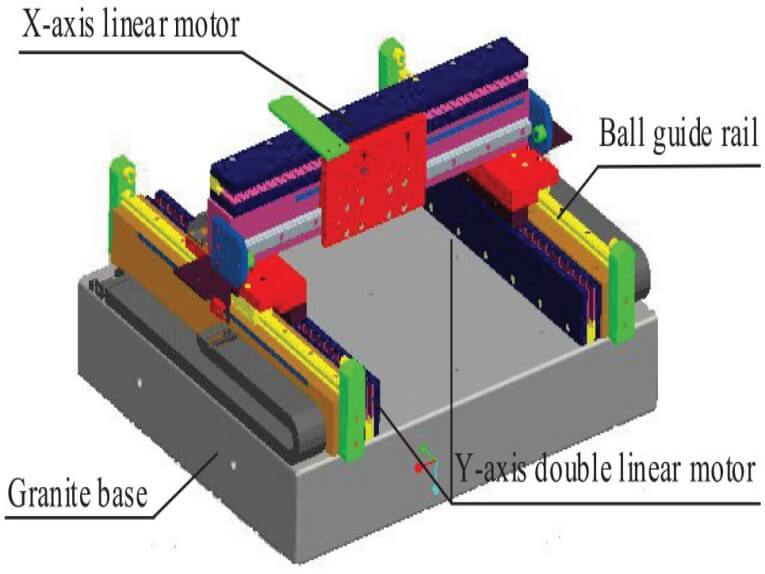
Что такое линейный робот XYZ?
Робот с декартовыми координатами также называют прямолинейным роботом или XYZ-роботом сферической конфигурации, поскольку он оснащен тремя скользящими шарнирами для сборки осей XYZ. Движение манипулятора робота, использующего декартову конфигурацию, может быть описано тремя пересекающимися осями...Читать далее -
Революционизация управления движением с помощью линейных двигателей.
Линейные двигатели переосмыслили возможности управления движением, обеспечив более высокую скорость, точность и надежность по сравнению с традиционными линейными актуаторами с вращающимися двигателями. Уникальное свойство линейного двигателя заключается в том, что нагрузка перемещается без механических компонентов передачи мощности.Читать далее -
Линейные двигатели и исполнительные механизмы отвечают потребностям автоматизации.
Линейные двигатели и приводы теперь конкурентоспособны по стоимости с шариковыми винтами и ременными передачами и обеспечивают значительно превосходную маневренность и пропускную способность для сложных задач позиционирования. Новые микромоторы и приводы помогают автоматизировать задачи, которые ранее были невозможны. Прямые линейные приводы все чаще используются...Читать далее -
Почему следует использовать линейный двигатель вместо шариковинтовой передачи или линейного актуатора?
Когда кто-то говорит «двигатель», большинство людей обычно представляют себе что-то вращающееся. Однако двигатели могут иметь разные формы, например, линейные двигатели. Линейный двигатель был изобретен в конце 1940-х годов доктором Эриком Лайтвейтом из Манчестерского университета. Они начали...Читать далее -
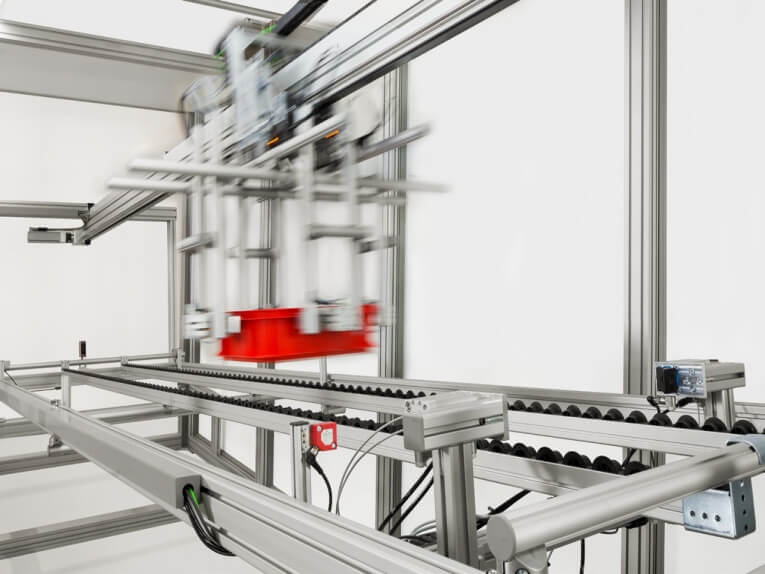
Конец линии: эффективные типы роботов для паллетирования, упаковки и маркировки.
Процессы паллетирования, обмотки паллет пленкой и маркировки составляют заключительные этапы производственной линии для большинства видов упаковки, независимо от типа продукции. Исходя из потребностей производителей, в данной статье представлены оптимальные решения для каждого процесса, а также освещены возникающие проблемы…Читать далее -
Что такое линейный двигатель? Принцип работы двигателя с железным сердечником и безжелезного двигателя.
Линейные двигатели — это особый класс синхронных бесщеточных серводвигателей. Они работают как моментные двигатели, но имеют развернутую и плоскую конструкцию. Благодаря электромагнитному взаимодействию между обмоткой (первичная часть) и постоянным магнитом (вторичная часть) передается электрическая энергия…Читать далее -
Что такое линейный двигатель – преимущества прямого привода?
Почему стоит выбрать линейные двигатели? Снижение эксплуатационных расходов. Прямое соединение полезной нагрузки с подвижной частью двигателя исключает необходимость в механических элементах передачи, таких как ходовые винты, зубчатые ремни, реечные передачи и червячные редукторы. В отличие от коллекторных двигателей, отсутствует контакт между...Читать далее -
Что такое линейный двигатель?
Линейный двигатель часто описывают как роторный двигатель, только в разобранном виде, так что вместо вращающегося вала, создающего крутящий момент, силу создает нагрузка, движущаяся линейно. Линейные двигатели используют магнитную левитацию для перемещения объекта — таким образом, он не замедляется трением и может фактически...Читать далее
