








Na física clássica, quatro tipos básicos de movimento são definidos: linear, rotativo, alternativo e oscilatório. Quando aplicados a dispositivos mecânicos, esse comportamento físico natural transforma o movimento em força. Essa força ou potência é então usada para criar alguma forma de movimento de saída, que aciona o equipamento ou a máquina. Na automação industrial, utilizamos uma ampla variedade de equipamentos que empregam esses diferentes tipos de sistemas de movimento, geralmente rotativo ou linear, mas às vezes uma combinação de ambos.
Movimento Linear
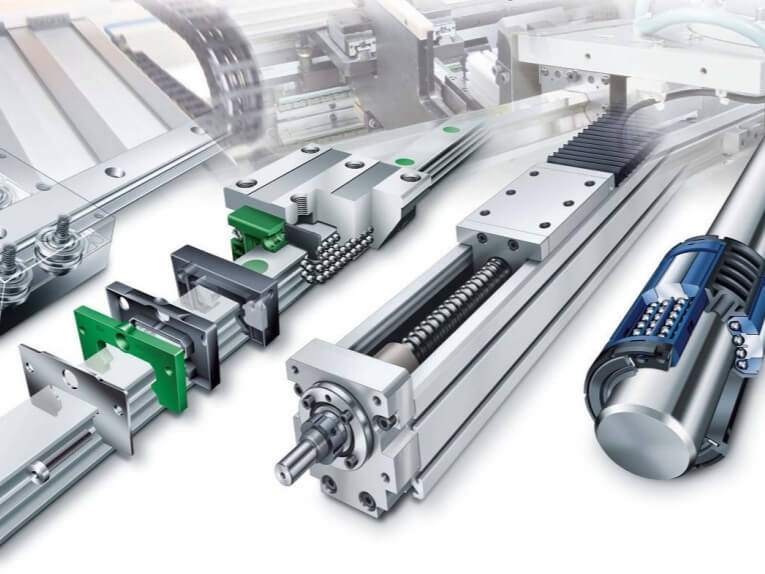
O movimento linear é a forma mais simples e fundamental de movimento, caracterizado pela alteração da posição em uma única direção. Imagine uma pessoa caminhando, nadando ou correndo em linha reta, ou um objeto mecânico como um veículo se deslocando em linha reta. Um sistema de movimento linear é baseado em algum tipo de mecanismo que move uma carga ao longo de um único eixo. Em sistemas pneumáticos, as cargas são acionadas em linha reta por dispositivos como motores lineares, guias ou atuadores, ou conjuntos de fusos de esferas. Você encontrará esse tipo de sistema de movimento com mais frequência em aplicações como movimentação de materiais, usinagem CNC, embalagem, paletização e robótica.
Tipos de acionamento linear
Diversas tecnologias de acionamento empregam movimento linear, cada uma com suas próprias vantagens.
1. Motores linearesCriam movimento linear direto. Podem acelerar rapidamente a altas velocidades e não requerem conversão mecânica. São muito adequados para aplicações de pegar e colocar.
2. Guias linearesGuias como roletes ou trilhos proporcionam um movimento linear suave e com baixo atrito. São frequentemente utilizadas em automação e máquinas-ferramenta para suportar cargas pesadas.
3. Fusos de esferasConvertem movimentos rotativos em movimentos lineares. São extremamente precisos e eficientes, sendo muito utilizados em robótica e aplicações como máquinas CNC.
4. Sistemas de cremalheira e pinhãoProporcionam alta capacidade de força e longos percursos, utilizando engrenagens dentadas para converter movimento rotativo em movimento linear. Você encontrará esse tipo de acionamento em sistemas de pórtico e máquinas de grande porte.
Movimento rotativo
A forma mais básica de movimento rotativo é a roda, onde algo gira ou rotaciona em qualquer direção em torno de um eixo central ou ponto de pivô. O movimento pode ser autogerado, como um tornado ou a rotação da Terra, mas em sistemas de automação, ele é criado por atuadores rotativos, sistemas acionados por engrenagens ou mesas rotativas.
Um atuador rotativo gera energia em um raio que pode ser um ângulo parcial de um círculo ou uma revolução completa e contínua. As aplicações que utilizam sistemas de movimento rotativo incluem turbinas para geração de energia eólica, hídrica ou a vapor, fusos de máquinas-ferramenta, ferramentas de perfuração ou retificação, juntas de robôs e mesas indexadoras.
Tipos de acionamento rotativo
Os dispositivos rotativos são classificados de acordo com sua fonte de energia, incluindo os manuais, elétricos ou movidos a fluido (hidráulicos ou pneumáticos).
1. Transmissões manuaisCria-se movimento rotativo com um sistema de engrenagens, normalmente uma roda operada manualmente que transmite energia rotacional através da engrenagem para o elemento atuador. O torque mecânico reduz o esforço necessário para mover uma carga grande.
2. Acionamentos rotativos elétricosGeralmente funcionam com um motor que controla um sistema de engrenagens. Normalmente são reversíveis e podem gerar rotação angular ou oscilação. Um controlador elétrico regula a corrente de entrada do motor, permitindo variar a aceleração e a velocidade.
3. Acionamentos rotativos hidráulicosUtilizam ar comprimido ou fluido para gerar movimento. Existem muitas maneiras de fazer isso, incluindo aquelas que usam engrenagens de cremalheira e pinhão, pressão sobre uma palheta ou diafragma, ou um sistema de pistão e acoplamento rotativo chamado garfo escocês.
Sistemas de movimento combinados
Tarefas mais complexas criam um sistema a partir de uma combinação de tipos de movimento, mais comumente linear e rotativo. Você encontrará esses sistemas em aplicações como operações de pegar e colocar e robótica, onde são usados em diferentes tipos de robôs e alguns braços robóticos. Você também verá avanços tecnológicos em soluções para controle de movimento multieixo e programação eletrônica complexa.
Acionamentos de movimento combinado
Para obter movimentos precisos com acionamentos combinados, as principais soluções são engrenagens, correias e fusos de esferas. Cada solução possui seus pontos fortes e fracos, incluindo repetibilidade, velocidade de posicionamento, precisão e custo.
1. EngrenagensEngrenagens são dispositivos mecânicos que transmitem torque através do encaixe de dentes. Os dentes no mecanismo de engrenagem se encaixam com peças dentadas compatíveis em outra engrenagem ou acionamento para criar força rotacional. As engrenagens geralmente são circulares, com uma circunferência dentada, mas também é possível colocar dentes no diâmetro interno de uma roda dentada. Esses projetos são normalmente usados em aplicações com restrições de espaço e peso e oferecem um alto grau de controle de torque e velocidade. Duas ou mais engrenagens interligadas também podem funcionar em sequência como um trem de engrenagens para transmitir movimento rotacional, normalmente acionado por um motor.
2. Transmissões por correiaGeralmente, consistem em uma fita ou correia circular flexível que conecta um par de polias. São acionadas por um motor e seu movimento cíclico transmite energia rotacional de um local para outro. São muito úteis em aplicações que precisam percorrer longas distâncias, sendo mais leves, silenciosas, baratas e eficientes do que as engrenagens. A aplicação mais comum de transmissões por correia é em sistemas de esteiras transportadoras e correias de comando para motores.
3. Como um fuso de esferas,Os fusos de esferas ou fusos de potência convertem o movimento rotativo de um parafuso ou porca em movimento linear. Os fusos de esferas e as porcas utilizam um design de rosca helicoidal para traduzir o movimento, sendo por isso também frequentemente chamados de parafusos de translação. Estão disponíveis em uma ampla variedade de tamanhos e valores, permitindo determinar a quantidade de movimento que será fornecida em uma revolução do fuso. Isso os torna viáveis tanto para acionamentos que exigem alta precisão e velocidade, como a cabeça de leitura de discos, quanto para aqueles que requerem baixa velocidade e alto torque, como uma morsa de bancada. Os fusos de esferas também são adequados para aplicações que exigem alta transferência de carga ou movimento preciso e são comumente usados em máquinas de hobby e robótica.
Que tipo de movimento você deve escolher?
O tipo de sistema de movimento que você utiliza depende muito da sua aplicação e do ambiente de trabalho. Quanto espaço você tem disponível ou qual a distância a percorrer? Outros fatores a serem considerados incluem a precisão e a velocidade necessárias, bem como a força exigida para realizar a tarefa. A escolha entre sistemas de movimento linear, rotativo ou combinado pode exigir cálculos complexos. Em caso de dúvidas ou necessidade de assistência, não hesite em contatar nossos especialistas aqui na FUYU Motion.
Data da publicação: 23/09/2025