






The key is adding stacked rotors and stators, but you must live with a physically longer motor.
Step motors provide accurate position control without the need for feedback, traditionally in open-loop control schemes. A stepper motor’s shaft normally makes discrete angular movements of essentially uniform magnitude when driven by a DC power supply. One digital pulse causes one increment of angular movement for the step motor. As the digital pulses increase, the step motor rotates. A specific number of pulses move the motor to an exact position.
Step motors are the preferred technology for many motion control applications due to their simplistic operation, excellent positioning and low cost. When operated as open-loop devices, step motors are best in applications with lower speeds, well-defined loads, and repetitive motion. SH: Frame Sizes
The National Electric Manufacturers Association (NEMA) established frame-size standardization to make intelligent choices among the different motor sizes easier. Step motors are categorized by frame size, such as “size 11” or “size 23.” Frame size numbers indicate motor faceplate dimensions. A size 11 stepper motor, for example, has a 1.1 × 1.1-in. faceplate while a size 23 stepper motor faceplate is approximately 2.3 × 2.3-in. (56.4 × 56.4 mm).
NEMA standards let users switch from one step-motor manufacturer to another without having to significantly change mounting brackets, couplings and other mounting components. However, two motors with the same NEMA size but from different manufacturers may still differ somewhat. Shaft length and the presence of a flat for use with set screws vary among vendors. NEMA standards also do not dictate electrical characteristics such as the number of lead wires or winding impedance. Consider all specifications carefully before buying step motors from a different manufacturer.
Step motors in frame sizes 8, 11 and 14 are ideal for applications in which space is a premium such as medical devices, laboratory automation equipment, printers, ATMs, surveillance equipment, and consumer electronics. Larger size step motors are often used in industrial applications such as packaging machinery, test-and-measurement equipment, assembly machinery, semiconductor fabrication equipment, and material handling equipment.
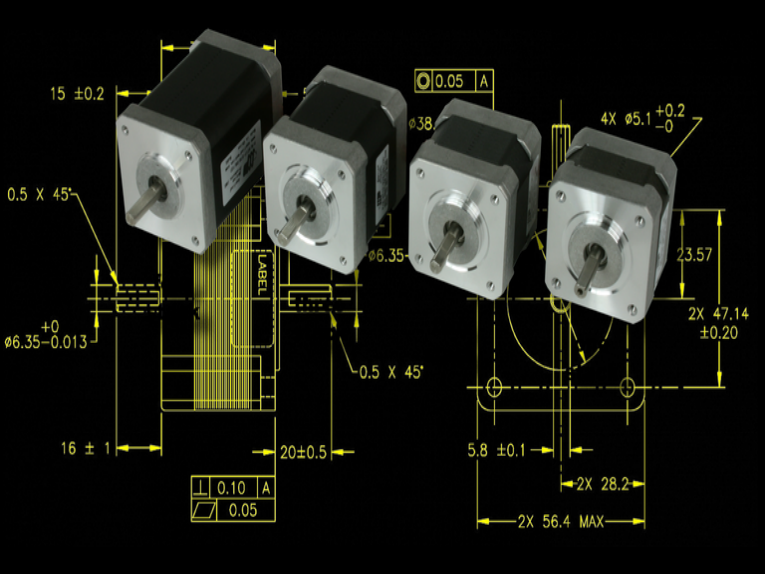
Larger frame size step motors create more torque than smaller-sized motors. Although they increase torque, these larger motors don’t always fit in an application’s limited space. However, if the primary space limitation is motor diameter, engineers can increase step-motor torque within a given frame size by increasing the motor’s length. To build a step motor with higher torque, several rotor and stator sections are “stacked” together, thus the increased length. The step motor generates more torque at the expense of being longer, but not wider or taller. The effect of stack length in size 17 motors can be seen in the nearby image.
The chart here shows typical holding torque specifications (in units of Newton-meters) for motors of varying frame sizes and stack lengths. Different stack lengths within a frame size give engineers flexibility when selecting motors for an application. Sometimes space is available for a longer motor, and other times it is advantageous to use a shorter motor with larger frame size.
Ultra-high-torque step motors are another way of effectively increasing torque within a given frame size. They can boost holding torque by 25 to 45% in a stepper motor identical in size to a conventional motor. So, ultra-high torque step motors avoid the need to specify larger frame sizes to get enough torque for an application.
An enhanced magnetic design lets these step motors produce greater torque based on the variance in magnetic permeability created by the rotor and stator teeth. The addition of rare-earth magnets between teeth improves the magnetic permeability variation.
For example, a conventional size 34 stepper motor can produce 5.9 N-m of holding torque. The ultra-high-torque version of the same motor produces up to 9 N-m of holding torque. For a conventional motor to achieve this same torque rating would require a 31% longer motor.
Although motor torque and speed are critical factors in selecting the best step motor for an application, don’t overlook the importance of motor frame size, length, and type. Too large a motor may waste money or generate too much heat. Too small a motor may not deliver enough torque for reliable motion control. Look at stack length and ultra-high-torque motor designs to increase torque when moving to a larger frame size is not feasible. And when in doubt, it’s always a good idea to discuss the best options for your application with your motor supplier.
Post time: Mar-22-2021