







-
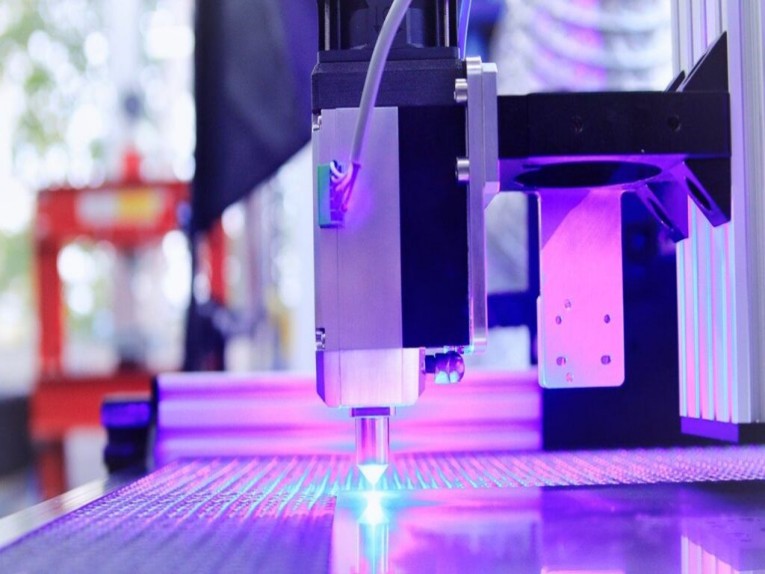
レーザー切断ロボット:精度と生産性の融合
レーザー切断ロボットは、強力でありながら複雑な製造ツールです。導入するメーカーに高品質な結果をもたらしますが、切断ロボットのラインナップの中でどのような位置づけにあるのかを理解することが不可欠です。レーザー切断ロボットとは何か、さまざまな種類のレーザー切断ロボット、そして…を理解することで、続きを読む -
リニアロボットとは何ですか?
自動化の進展に伴い、直線ロボットの需要が拡大しています。直線ロボットは、回転するのではなく直線上を移動する2つまたは3つの主軸を持つ産業用ロボットの一種で、各主軸は互いに直角に機能します。3つのスライドジョイントは、ワークの移動に対応しています。続きを読む -
直交座標ロボットを使った自動化は、どのような場合に行うべきでしょうか?
直交座標ロボットは幅広い用途に適しています。では、どのような場合に直交座標ロボットがあなたとあなたのプロジェクトに適しているのでしょうか?この質問にこの記事だけで正確に答えることはできません。しかし、いくつかの質問と考慮事項は、直交座標ロボットが適切な選択肢であるかどうかを理解するための正しい道筋をたどるのに役立ちます。続きを読む -

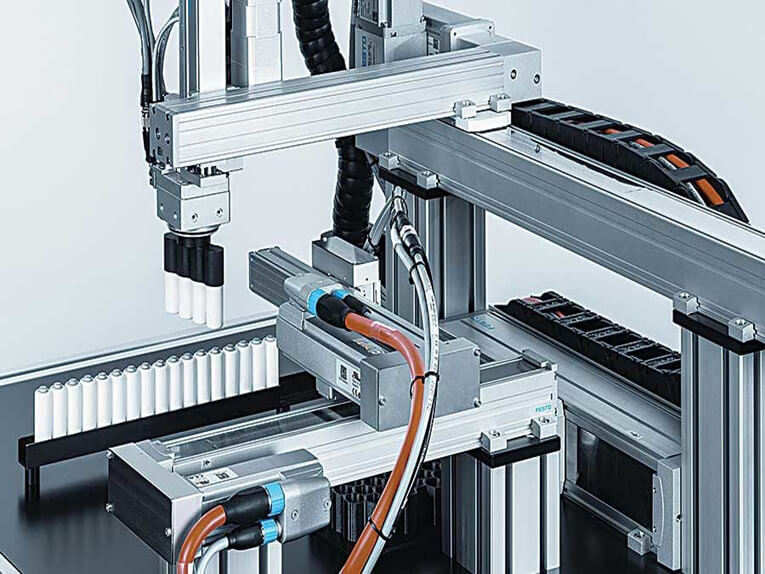
直交座標ロボットとは何ですか?
直線位置決めシステムの定義、設計、構成。直交ロボットの定義 直交ロボットまたは直交座標ロボット(直線ロボットとも呼ばれる)は、3 つの主要な制御軸がすべて直線である(つまり、直線に沿って移動する)産業用ロボットです。続きを読む -

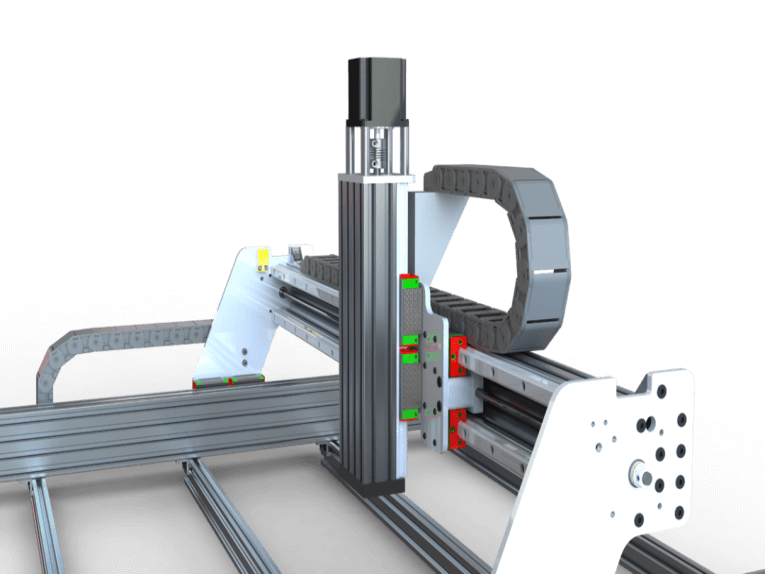
ピックアンドプレースガントリー式直交座標産業用ロボット
実験室での使用など、ピックアンドプレース用途では、部品に容易にアクセスできるため、片持ち梁構造が有利です。ガントリーロボットは、両端で水平部材が支持された直交座標ロボットです。物理的には、ガントリークレーンに似ていますが、必ずしも...続きを読む -

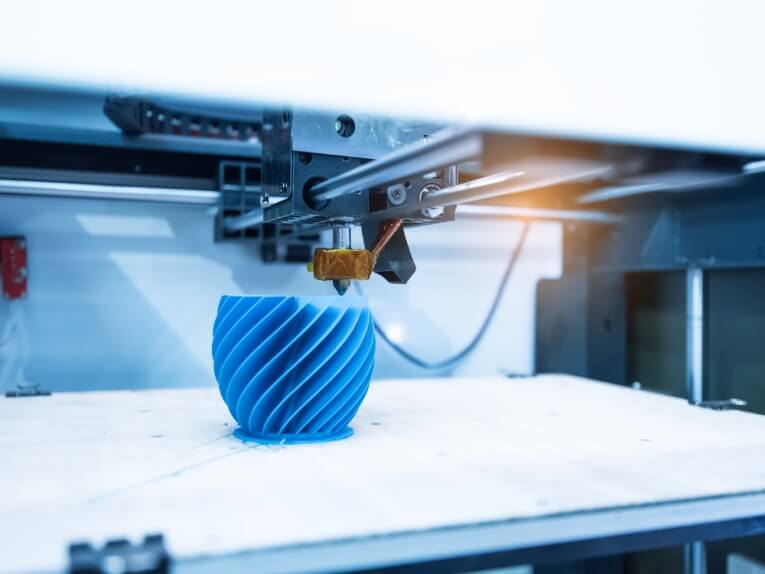
直交座標ロボットは何に使用されますか?直線ロボットアプリケーション。
コンピュータ数値制御工作機械(CNC工作機械)と3Dプリンティングは、直交座標ロボットの代表的な用途例です。フライス盤やプロッターは最も単純な用途で、ルーターやペンなどのツールがXY平面上を移動し、昇降します。続きを読む -
直交座標系ロボット、6軸ロボット、SCARAロボットの違い
直交ロボットの負荷 ロボットの負荷容量(メーカーの仕様による)は、ツール部品を含むロボットアーム先端の総ペイロード重量よりも大きくなければなりません。SCARAロボットと6軸ロボットは、延長されたコンポーネントに負荷がかかるため、この制約を受けます。例えば、...続きを読む -

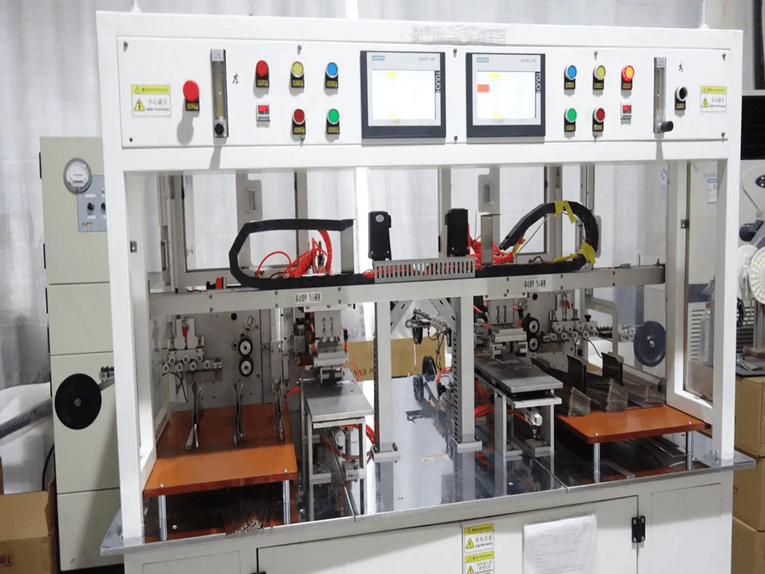
直線運動システムが診断機器の性能向上につながる仕組み
医療施設は、最も正確で効率的な結果を提供できるようになります。FUYUのモーションコントロールソリューション(リニアアクチュエータ、ボールねじアクチュエータ、リニアガイドなど)は、明確で一貫性のあるリアルタイム結果の提供において、いかに大きな違いを生み出すことができるかを証明しています。診断...続きを読む -

過酷な環境における直線運動設計の重要な詳細
直線運動システムは、さまざまな過酷な産業環境にさらされます。運動システムコンポーネントの慎重な仕様決定と選定、そして綿密なエンジニアリングレビューは、厳しい産業環境におけるリスクを軽減することができます。あらゆる機械式直線運動システムの設計において重要なステップは、…続きを読む -
リニアガイドの選択と使用における5つの主な間違い
ガイド自体の仕様を決めるのは簡単な部分ですが、取り付け、設置、さらにはメッキの選択における落とし穴を回避する方法を学ぶ必要があります。リニアガイドはシステムの一部として動作する精密機械部品です。そのため、適切にシステムに組み込まれている場合にのみ、その性能を発揮します。続きを読む -
自動化倉庫におけるロボットハンドリングのための直線運動
自動倉庫の設計と構成において、設計目標の一つは、システムをできるだけ軽量かつコンパクトに保つことです。搬送する荷物のサイズに応じて、自動倉庫には大きく分けて2つのタイプがあります。軽量用途では、アルミニウム構造で最大10kgまでの荷物を処理できます。続きを読む -
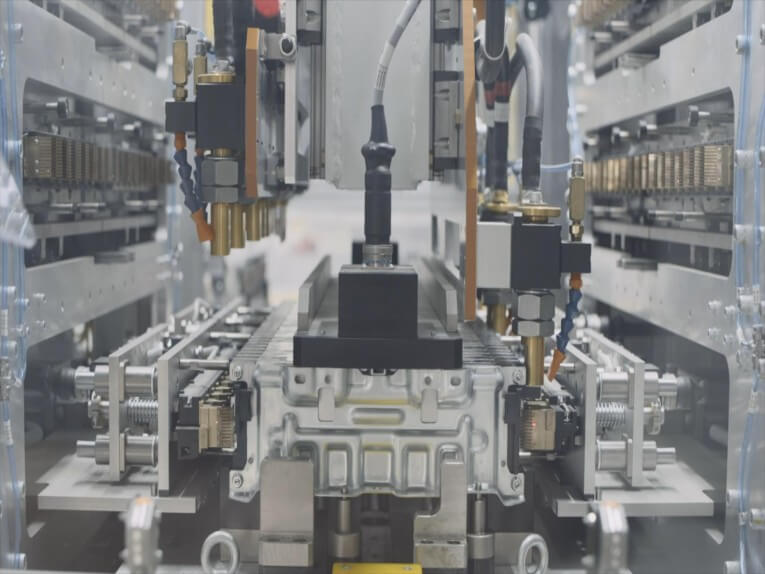
レーザー溶接ロボット:高速製造の未来
レーザー溶接ロボット入門 製造部品が複雑化するにつれて、精密な組み立てソリューションへの需要が高まります。プラスチック製造でより高度な部品が生産されるようになると、この問題はさらに深刻化します。レーザー溶接はこれらの問題に対する解決策を提供します。レーザー溶接はまた、溶接を…続きを読む
