







-

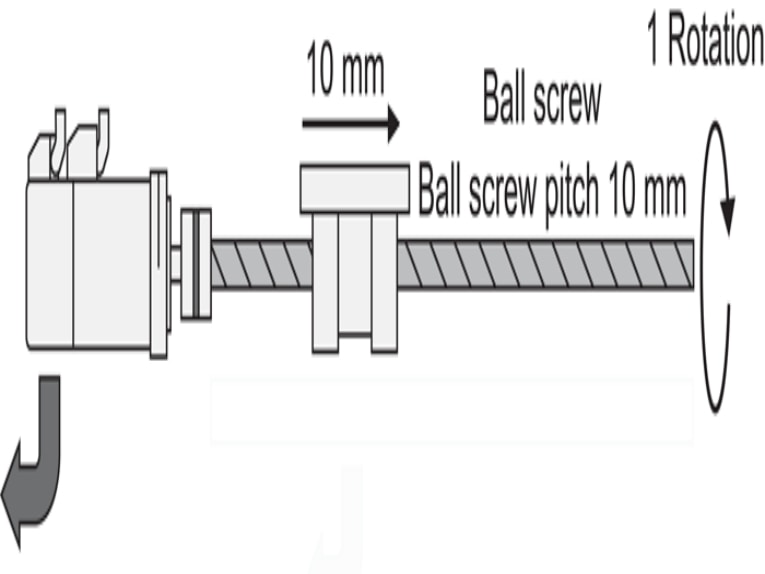
रेखीय गति का बेहतर नियंत्रण
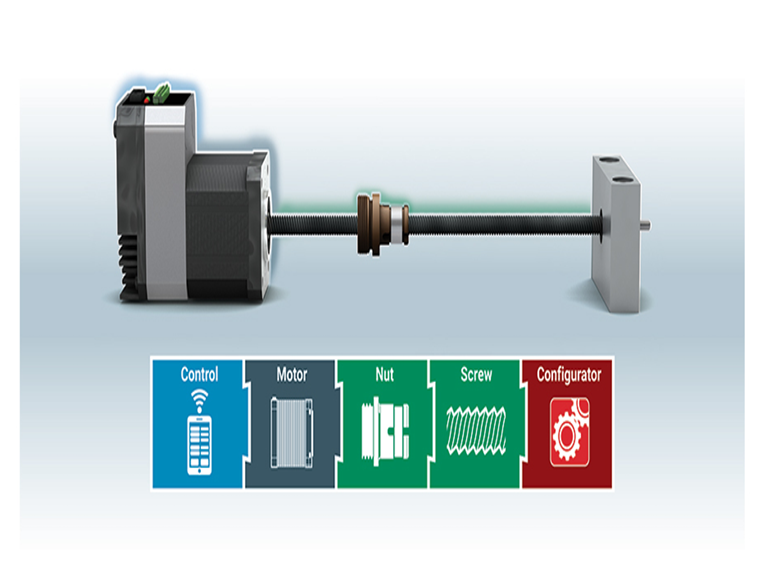
सटीक स्वचालित स्थिति निर्धारण के लिए, स्टेपर-मोटर आधारित रैखिक एक्चुएटर्स पर विचार करें। रैखिक एक्चुएटर्स मूल रूप से एक सीधी रेखा में बल और गति उत्पन्न करते हैं। एक विशिष्ट यांत्रिक प्रणाली में, किसी उपकरण का आउटपुट शाफ्ट गियर, बेल्ट और पुली के माध्यम से रोटरी मोटर का उपयोग करके रैखिक गति प्रदान करता है...और पढ़ें -

सर्वो या स्टेपर में से कौन सी मोटर सबसे अच्छी है?
क्लोज्ड-लूप स्टेपर मोटर्स उन कार्यों के लिए सबसे अच्छा विकल्प हो सकती हैं जो आमतौर पर सर्वो मोटर्स द्वारा किए जाते हैं क्योंकि पारंपरिक स्टेपर मोटर्स उन्हें संभाल नहीं सकतीं। किसी भी प्रकार की गति नियंत्रण प्रक्रिया को डिजाइन करते समय इंजीनियरों द्वारा लिए जाने वाले सबसे महत्वपूर्ण निर्णयों में से एक मोटर का चयन करना है। सही मोटर का चयन करना, दोनों ही दृष्टियों से...और पढ़ें -
परिशुद्ध रैखिक मॉड्यूल के चयन के लिए पांच प्रमुख कारक
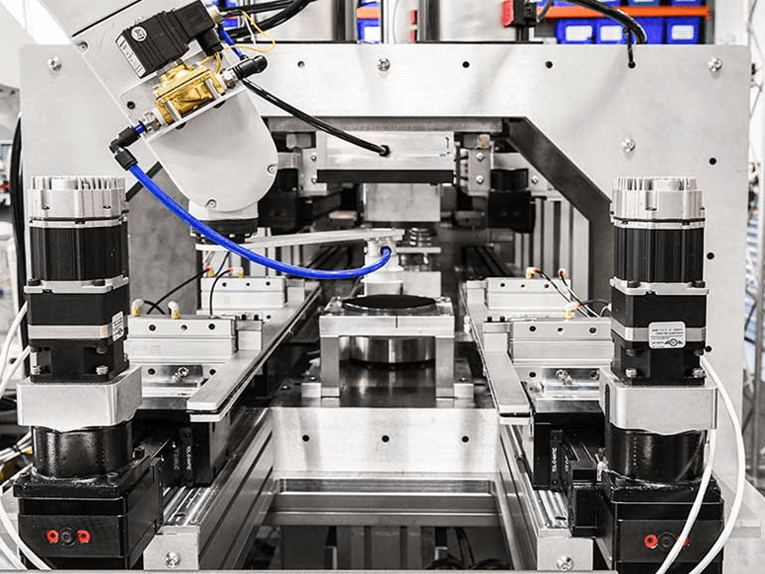
तैयार-स्थापित रैखिक मॉड्यूल का उपयोग विभिन्न उद्योगों में कई प्रकार की मशीनों में सामग्री, उत्पाद और उत्पादन उपकरण को स्थानांतरित करने के लिए किया जाता है। मशीन डिज़ाइनरों के पास विशिष्ट उत्पादन और प्रदर्शन आवश्यकताओं के आधार पर रैखिक मॉड्यूल का चयन करते समय कई विकल्प उपलब्ध होते हैं।और पढ़ें -

अच्छे मशीन डिजाइन के लिए आधार तैयार करना
आपका मोशन कंट्रोलर कितना भी उन्नत क्यों न हो, यह खराब डिज़ाइन वाले इलेक्ट्रोमैकेनिकल सिस्टम की कमियों को दूर नहीं कर सकता। मोशन-कंट्रोल सिस्टम में तीन मुख्य घटक होते हैं: पोजिशनिंग मैकेनिज्म, मोटर ड्राइव इलेक्ट्रॉनिक्स और मोशन कंट्रोलर। इनमें से प्रत्येक घटक को सावधानीपूर्वक डिज़ाइन किया जाना चाहिए...और पढ़ें -
रेखीय गति प्रणाली को कैसे डिजाइन करें
लीनियर सिस्टम डिज़ाइन करते समय सपोर्ट, गाइड, ड्राइव और सील पर विचार करें। लीनियर सिस्टम डिज़ाइन शुरू करने से पहले अपनी परिशुद्धता, दोहराव, लोडिंग और पर्यावरणीय आवश्यकताओं को जान लें। कम घर्षण और उच्च कठोरता वाले बॉल गाइड एक रेल (ऊपर) या दो (नीचे) पर सपोर्ट प्रदान करते हैं। इनके फायदे और नुकसान...और पढ़ें -
इलेक्ट्रिक लीनियर एक्चुएटर्स: बनाएं या खरीदें?
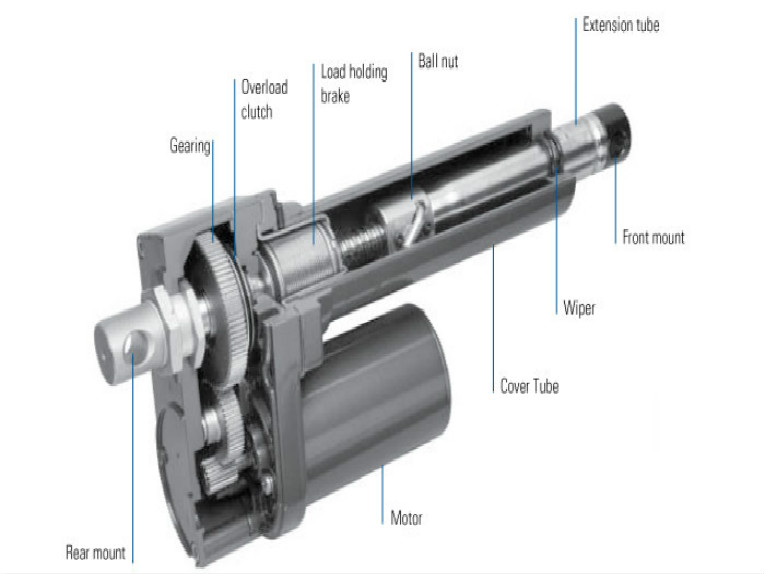
किसी इलेक्ट्रिक लीनियर एक्चुएटर सिस्टम को स्वयं इंजीनियर करना अक्सर स्वचालित गति समाधान के लिए सबसे किफायती और समय बचाने वाला तरीका होता है। लेकिन कभी-कभी खरीदना ही बेहतर होता है। आपकी इलेक्ट्रिक लीनियर एक्चुएटर की ज़रूरतें आपसे बेहतर कौन जान सकता है? और आज आप इतने सारे तैयार उत्पाद खरीद सकते हैं...और पढ़ें -
नए वेंटिलेटर प्रोटोटाइप रैखिक एक्चुएटर्स पर निर्भर करते हैं
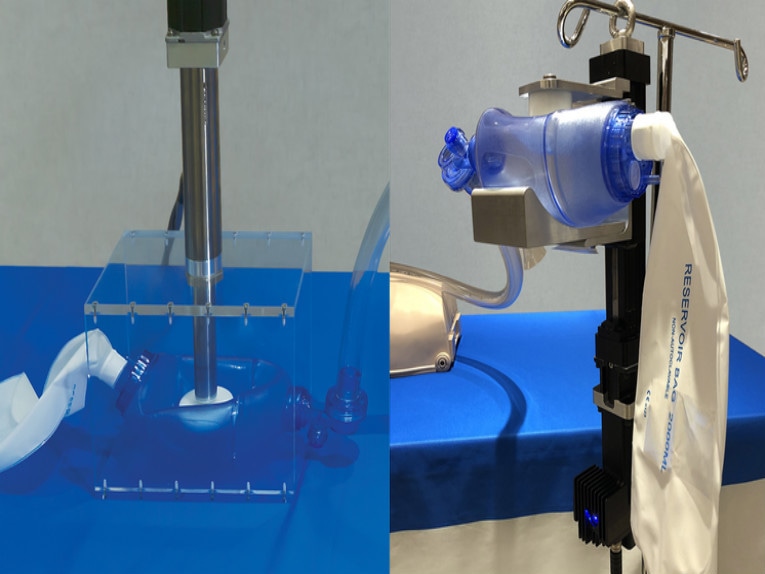
मरीजों को सुरक्षित और प्रभावी ढंग से ऑक्सीजन पहुंचाना। बैग वाल्व मास्क, जिन्हें एम्बू बैग (कृत्रिम मैनुअल ब्रीदिंग यूनिट) भी कहा जाता है, उन मरीजों को ऑक्सीजन पहुंचाने के लिए उपयोग किए जाते हैं जो स्वयं सांस नहीं ले पा रहे हैं। हालांकि इन्होंने कई जानें बचाई हैं, फिर भी ये गंभीर रूप से बीमार मरीजों के इलाज के लिए उपयुक्त नहीं हैं...और पढ़ें -
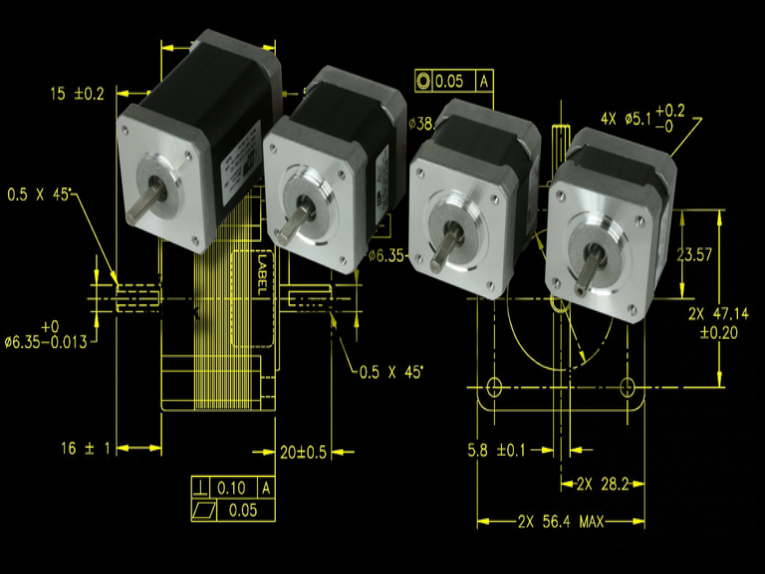
फ्रेम का आकार बढ़ाए बिना स्टेप मोटर के टॉर्क को बढ़ाना
मुख्य बात स्टैक्ड रोटर्स और स्टेटर्स को जोड़ना है, लेकिन इसके लिए आपको भौतिक रूप से लंबी मोटर के साथ काम चलाना होगा। स्टेप मोटर्स फीडबैक की आवश्यकता के बिना सटीक स्थिति नियंत्रण प्रदान करती हैं, जो पारंपरिक रूप से ओपन-लूप नियंत्रण योजनाओं में उपयोग की जाती हैं। एक स्टेपर मोटर का शाफ्ट सामान्यतः अनिवार्य रूप से अलग-अलग कोणीय गति करता है...और पढ़ें -
संक्षारण प्रतिरोध में आपके विकल्पों को समझना
लीनियर बेयरिंग के विकल्पों में बेयरिंग सामग्री, कोटिंग और स्रोत शामिल हैं। संक्षारण एक ऑक्सीकरण प्रतिक्रिया है जो अधिकांश धातुओं को प्रभावित करती है। स्टील के मामले में, हवा और पानी के संपर्क में आने पर लोहा ऑक्सीकृत होकर जंग बनाता है, जो समय के साथ धीरे-धीरे सामग्री को नष्ट कर सकता है। स्टील की सतहें...और पढ़ें -
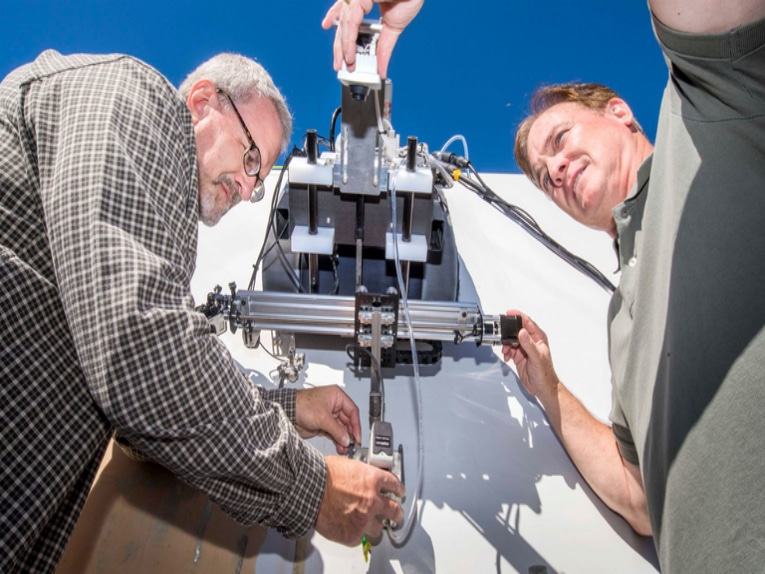
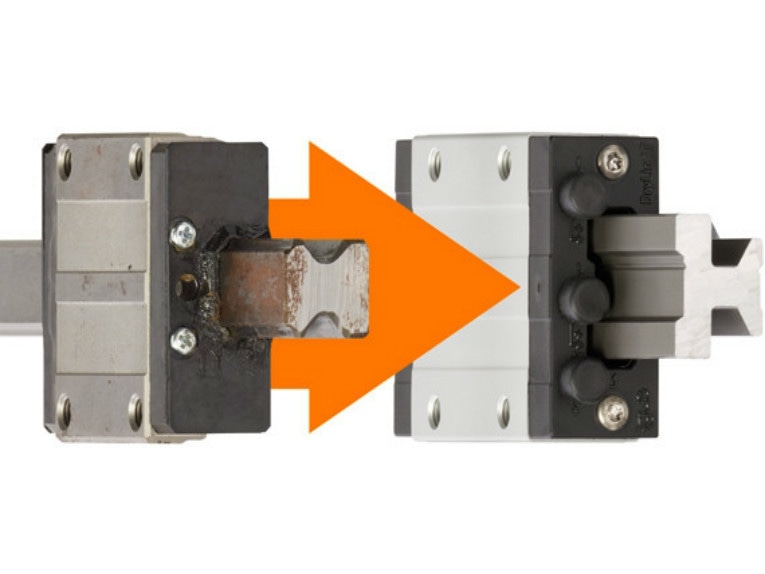
रेंगने वाले रोबोट और उड़ने वाले ड्रोन क्षतिग्रस्त पवन चक्कियों का पता लगाते हैं
रोबोट, ड्रोन और सेंसर अब निरीक्षण में मदद करते हैं और निकट भविष्य में इन्हें पूरी तरह से स्वचालित किया जा सकता है। विशेष स्कैनर से लैस ड्रोन और रेंगने वाले रोबोट पवन चक्कियों को लंबे समय तक चालू रखने में मदद कर सकते हैं, जिससे पवन ऊर्जा की लागत कम हो सकती है, ऐसे समय में जब चक्कियां पुरानी हो रही हैं...और पढ़ें -

अपने पहले औद्योगिक रोबोट का चयन, खरीद और प्रोग्रामिंग करना
पहली खरीदारी से अधिकतम लाभ उठाने के लिए कुछ त्वरित सुझाव। रोबोट निराश नहीं करते। एक विनिर्माण कंपनी जब अपना पहला औद्योगिक रोबोट स्थापित करती है, तो वह अपने कारखानों में स्वचालन बढ़ाने के लिए बार-बार और रोबोट खरीदती है। चूंकि रोबोट उत्पादकता बढ़ाते हैं, इसलिए...और पढ़ें -
गति नियंत्रण के लिए पल्स नियंत्रण की मूल बातें
केवल दो से तीन अक्षों वाले विद्युत एक्चुएटर्स की आवश्यकता वाली मशीनों को स्वचालित करने के लिए, पल्स आउटपुट सबसे सरल तरीका हो सकता है। पीएलसी से पल्स आउटपुट का उपयोग करना सरल गति प्राप्त करने का एक किफायती तरीका है। अधिकांश, यदि सभी नहीं, पीएलसी निर्माता पल्स का उपयोग करके सर्वो और स्टेपर को नियंत्रित करने का तरीका प्रदान करते हैं...और पढ़ें
