







-
एक्चुएशन की दुनिया इलेक्ट्रोमैकेनिकल की ओर अग्रसर हो रही है।
लीनियर एक्चुएटर्स की बात करें तो, गति, सटीकता और आकार के कारण इलेक्ट्रोमैकेनिकल उपकरण अपने न्यूमेटिक समकक्षों की तुलना में अधिक पसंदीदा विकल्प बनते जा रहे हैं। हाल के वर्षों में, कारखाने और कंपनी प्रबंधकों की ओर से इलेक्ट्रिक रॉड-स्टाइल एक्चुएटर्स का अधिक उपयोग करने और कम पी... की मांग बढ़ती जा रही है।और पढ़ें -
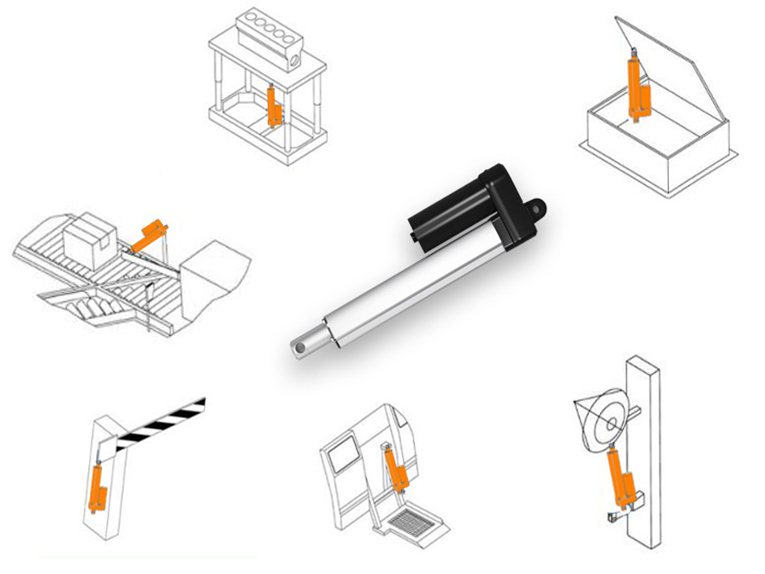
सही लीनियर एक्चुएटर का चयन कैसे करें
अपने अनुप्रयोग के लिए सही लीनियर एक्चुएटर का चयन करते समय आवश्यक गति, भार, स्ट्रोक लंबाई आदि का ध्यान रखना पड़ता है। एक सफल लीनियर मोशन सिस्टम का निर्माण उपयुक्त एक्चुएटर के चयन से शुरू होता है। विभिन्न आकारों, तकनीकों और गुणवत्ता वाले सैकड़ों विकल्प उपलब्ध हैं...और पढ़ें -
पैकेजिंग गति को सर्वो के साथ सिंक्रनाइज़ करना
ग्राहक कम रखरखाव, कम उपकरण आकार, तेज़ उत्पादन और मशीन सेटअप की मांग करते हैं। इन आवश्यकताओं को पूरा करने के लिए, उपकरण निर्माता यांत्रिक घटकों के स्थान पर सर्वो-नियंत्रित गति का चयन कर रहे हैं। गति नियंत्रण मशीन की क्षमताओं और सीमाओं को परिभाषित करता है। इसलिए, ...और पढ़ें -

गति परिदृश्य: पिक-एंड-प्लेस अनुप्रयोग
तेज़ गति से पिक-एंड-प्लेस करने वाले अनुप्रयोगों के लिए व्यापक स्वचालन डिज़ाइन करना मोशन इंजीनियरों के सामने आने वाले सबसे चुनौतीपूर्ण कार्यों में से एक है। जैसे-जैसे रोबोटिक सिस्टम अधिक जटिल होते जा रहे हैं और उत्पादन दरें लगातार बढ़ती जा रही हैं, सिस्टम डिज़ाइनरों को नवीनतम तकनीकों के साथ तालमेल बनाए रखना होगा अन्यथा विनिर्देशों में त्रुटि आने का खतरा रहता है...और पढ़ें -

लघु आकार का धूलरोधी संलग्न रैखिक मॉड्यूल – FUYU का नया उत्पाद
लीनियर मॉड्यूल के व्यापक अनुप्रयोग ने औद्योगिक स्वचालन में एक व्यापक नवाचार लाया है। 2019 में, हमने छोटे आकार, सटीक स्थिति निर्धारण और मजबूत व्यावहारिकता की विशेषताओं के आधार पर, 30 मिमी चौड़ाई वाले लघु स्क्रू मॉड्यूल, FSK30 को लॉन्च करने में अग्रणी भूमिका निभाई।और पढ़ें -

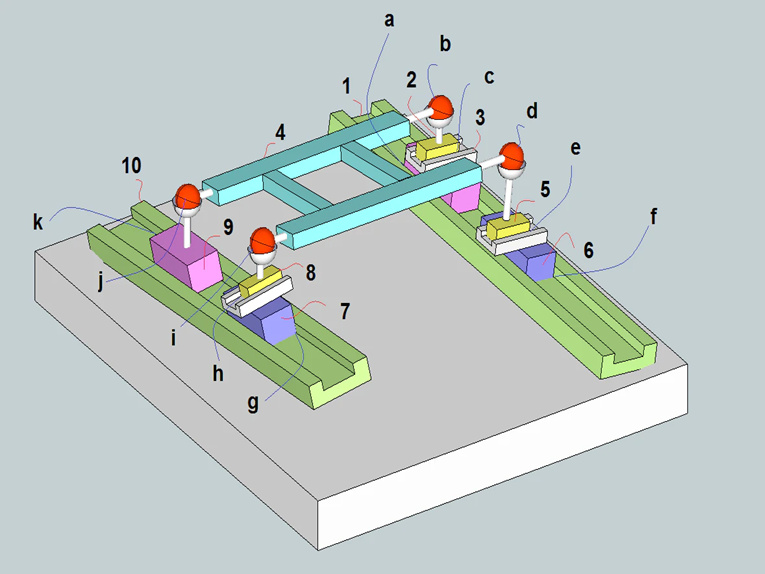
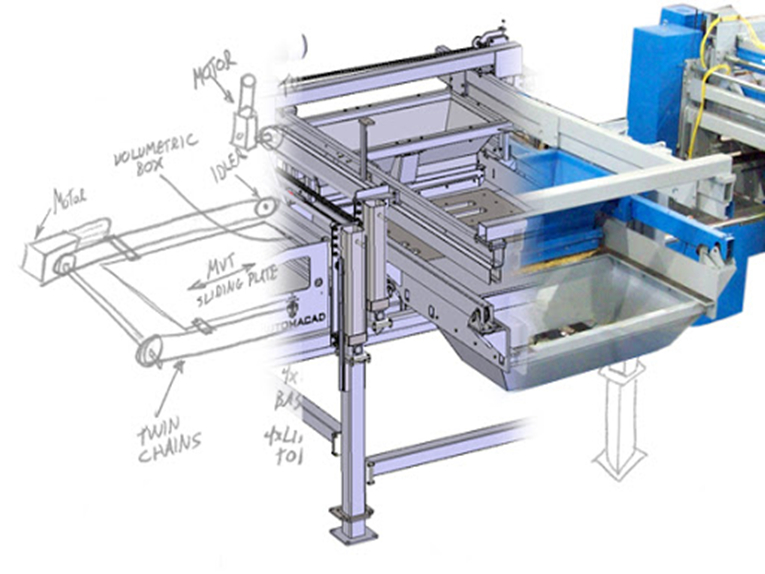
रेखीय गति प्रणाली का अनुप्रयोग अभियांत्रिकी उदाहरण
इंजीनियरों ने तीन अलग-अलग बाज़ारों से संबंधित तीन विशिष्ट अनुप्रयोगों का अध्ययन किया। वातावरण और अनुप्रयोग संबंधी विवरणों में भिन्नता के कारण वे तीन बहुत अलग-अलग अंतिम परिणामों पर पहुँचे। अनुप्रयोग 1 – पैकेजिंग: एक स्वचालित श्रिंक-रैपिंग मशीन को लंबवत स्थिति में रखने के लिए एक रैखिक इकाई की आवश्यकता है...और पढ़ें -
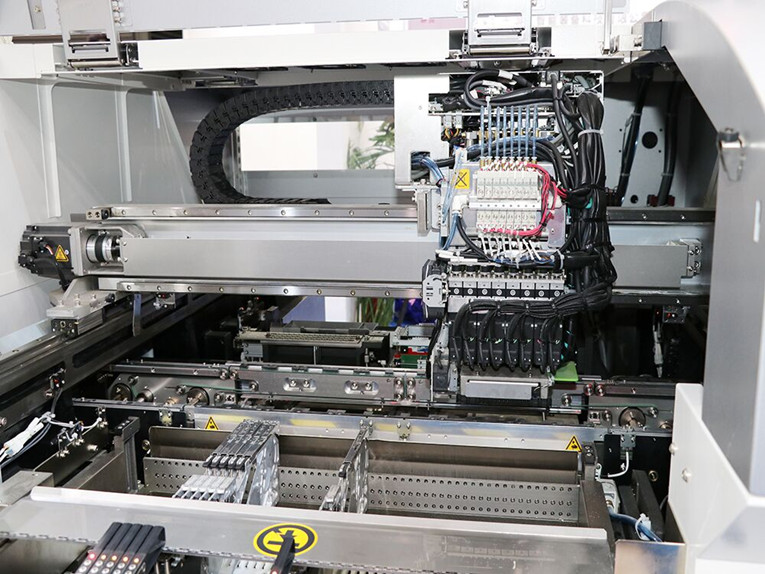
भारी स्वचालन और पिक एंड प्लेस के लिए रैखिक गति प्रणालियाँ
इस XZ गैन्ट्री में स्लाइड में ही रैक ड्राइव लगा हुआ है, जिससे अलग से रैक की आवश्यकता नहीं होती। Z अक्ष दूरबीन की तरह घूमता है, जो सीमित ऊंचाई होने पर उपयोगी होता है। कौन सी तकनीक उपयुक्त है, यह कई कारकों पर निर्भर करता है, जिनमें परिचालन वातावरण, स्थापना में आसानी, रखरखाव और लागत शामिल हैं।और पढ़ें -
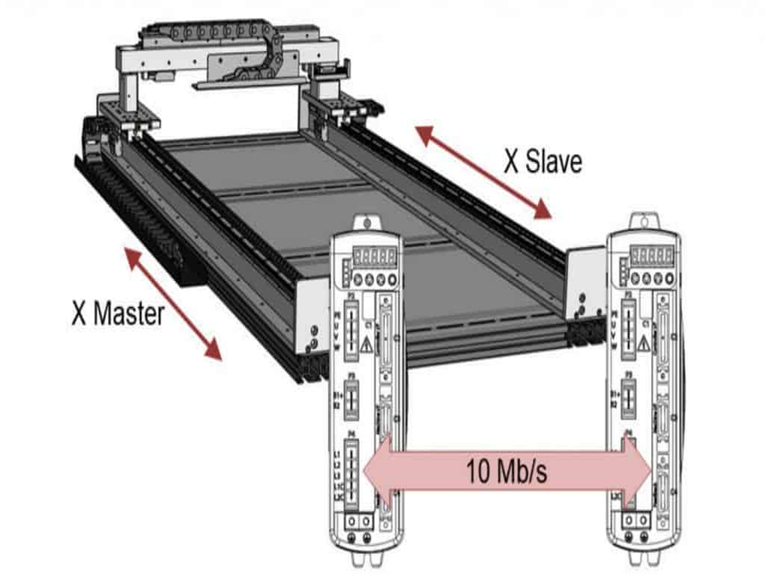
गैन्ट्री को सीधी और संकरी राह पर रखना
किफायती मिसअलाइनमेंट-कंपनसेशन तकनीकें बेयरिंग ओवरलोड और समय से पहले गैन्ट्री की विफलता को रोकती हैं। गैन्ट्री अलाइनमेंट टूल्स: पोजिशनिंग सिस्टम निर्माता जब गैन्ट्री सिस्टम का निर्माण करते हैं, तो वे आमतौर पर असेंबली प्रक्रिया के दौरान विशेष अलाइनमेंट टूल्स का उपयोग करते हैं ताकि यह सुनिश्चित हो सके कि वे बल, सटीकता और अन्य मानकों को पूरा करते हैं।और पढ़ें -

लीनियर मोटर्स: एक नई औद्योगिक क्रांति का नेतृत्व
लीनियर मोटर्स का उपयोग तेजी से बढ़ रहा है। ये मशीनों को उच्चतम स्तर की परिशुद्धता और गतिशील प्रदर्शन प्रदान करते हैं। लीनियर मोटर्स स्थिति निर्धारण के लिए बहुत तेज और सटीक होते हैं, लेकिन मशीन हेड और स्लाइड के साथ-साथ टूल और पार्ट हैंडलिंग सिस्टम के लिए धीमी, स्थिर-गति से चलने में भी सक्षम हैं। एक...और पढ़ें -
लीनियर एक्चुएटर्स के बारे में अक्सर न पूछे जाने वाले प्रश्न
लीनियर एक्चुएटर्स का चयन करने से पहले इंजीनियरों और डिजाइनरों को कुछ सवाल पूछने चाहिए। किसी विशिष्ट उपकरण या मशीन के लिए लीनियर एक्चुएटर का चयन करने वाले डिजाइनरों को आपूर्तिकर्ताओं और निर्माताओं से पूछने के लिए प्रश्नों की एक सूची तैयार रखनी चाहिए। ये सूचियाँ आमतौर पर...और पढ़ें -

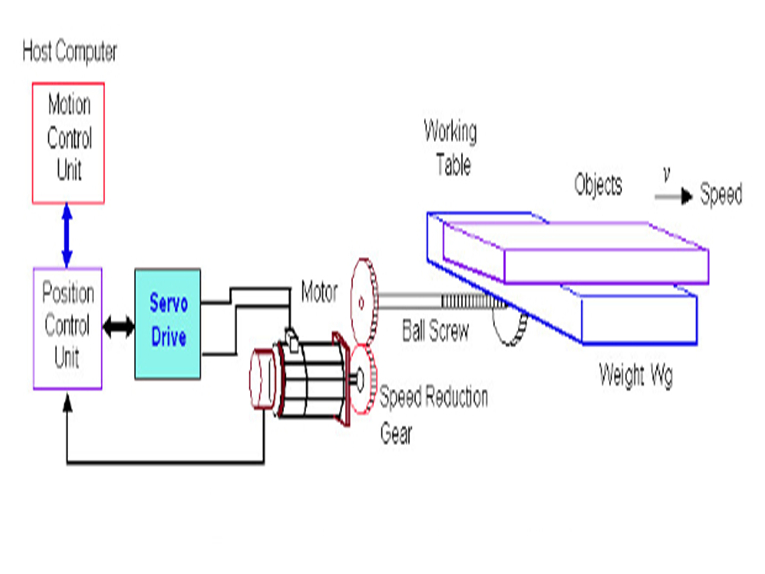
मोशन कंट्रोल – मोटरों के आकार का निर्धारण करने का एक आसान तरीका
मोशन-कंट्रोल अनुप्रयोगों में डीसी मोटरों के चयन में मोटर स्थिरांक सहायक होता है। ब्रश वाली और बिना ब्रश वाली डीसी मोटरें उन अनुप्रयोगों के लिए अच्छा विकल्प हैं जो बिजली के प्रति संवेदनशील हैं या दक्षता की मांग करते हैं। अक्सर, डीसी मोटर या जनरेटर के डेटा शीट में मोटर स्थिरांक (किलोमीटर) शामिल होता है, जो टॉर्क संवेदनशीलता को दर्शाता है।और पढ़ें -
गति नियंत्रण कार्यों के लिए सटीक स्थिति निर्धारण और अत्यधिक गतिशील प्रतिक्रिया कौन प्रदान करता है?
लीनियर मोटर ही इसका सटीक समाधान है। लीनियर मोटर कई गति-नियंत्रण कार्यों के लिए सटीक स्थिति निर्धारण और उच्च गतिशील प्रतिक्रिया प्रदान करती हैं। मशीन टूल्स के लिए, इनमें न केवल तीव्र गति से चलना शामिल है, बल्कि मशीन हेड, स्पिंडल स्लाइड, टूल-मैनेजमेंट सिस्टम और पार्ट हैंडलर की धीमी, स्थिर गति से गति भी शामिल है।और पढ़ें
