







-
रेखीय गति प्रणालियों में एक्चुएटर और गाइड संरेखण के नियम
रेखीय गति प्रणालियों को डिजाइन करने के लिए कुछ सरल दिशानिर्देशों का पालन करने से सिस्टम का प्रदर्शन और एक्चुएटर का जीवनकाल बेहतर हो सकता है। कई स्वचालित मशीनें गतिशील विद्युत पिंडों को निर्देशित और सहारा देने के लिए प्रोफाइल रेल, गोल रेल या अन्य रोलिंग या स्लाइडिंग बेयरिंग संरचनाओं जैसे रेखीय मार्गदर्शन घटकों पर निर्भर करती हैं।और पढ़ें -
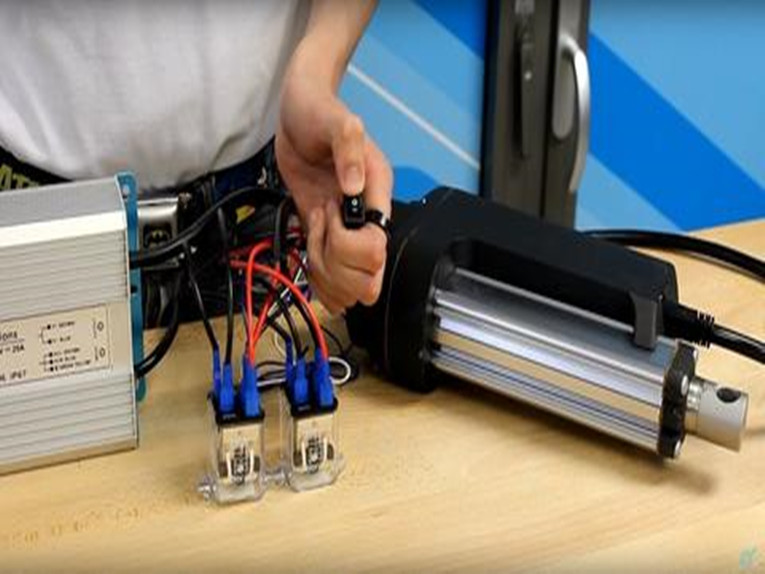
लीनियर एक्चुएटर्स क्या होते हैं और इनका आकार कैसे निर्धारित किया जाता है?
लीनियर एक्चुएटर्स कई तरह के चिकित्सा उपकरणों जैसे मेडिकल बेड, ऑपरेशन टेबल और डेंटल चेयर में महत्वपूर्ण भूमिका निभाते हैं। लीनियर एक्चुएटर एक यांत्रिक उपकरण है जो ऊर्जा को परिवर्तित करके सीधी रेखा में गति उत्पन्न करता है, जिससे आवश्यकतानुसार यांत्रिक पैरों को ऊपर उठाना, झुकाना या अंदर-बाहर करना संभव होता है।और पढ़ें -

चिकित्सा अनुप्रयोगों में रेखीय गति: रोगी लिफ्ट, बिस्तर और मेजों में रेखीय एक्चुएटर
अस्पताल या चिकित्सा सुविधा में किसी मरीज को एक जगह से दूसरी जगह ले जाने का मतलब हमेशा यह नहीं होता कि उसे व्हीलचेयर या स्ट्रेचर पर बिठाकर गलियारे में दौड़ाया जाए। अक्सर, मरीज को बस लेटने या बैठने की स्थिति से खड़े होने की स्थिति में (या इसके विपरीत) ले जाना होता है। यहां तक कि उन मरीजों के लिए भी जो...और पढ़ें -
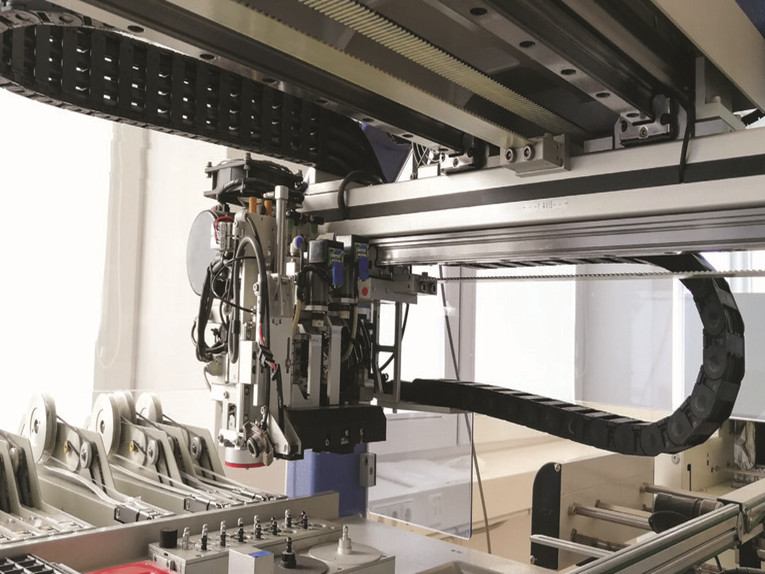
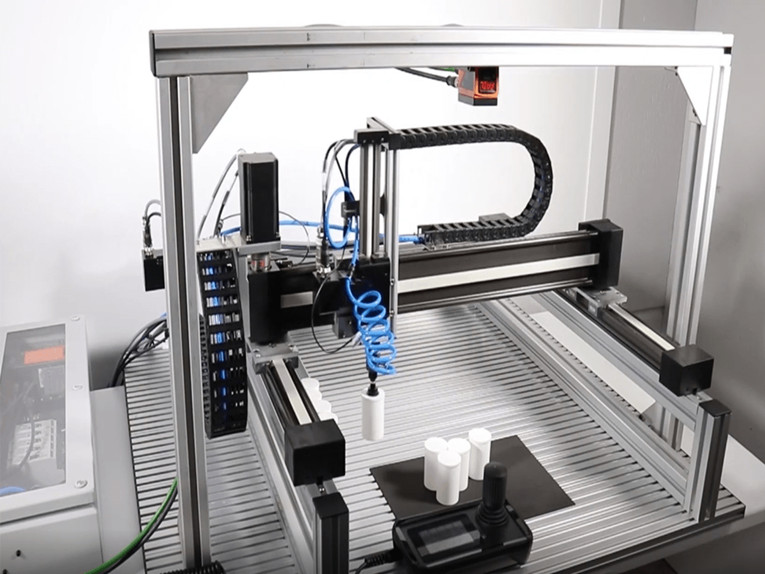
कार्टेशियन रोबोट के बारे में आपको क्या जानना चाहिए
कार्टेशियन रोबोट क्या है? कार्टेशियन निर्देशांक प्रणालियों पर काम करने वाली मशीनें दशकों से कारखानों में आम रही हैं। 3D प्रिंटर, लेजर कटर और CNC मशीनें ऐसे उपकरणों के उदाहरण हैं जो कार्टेशियन रोबोट के समान सिद्धांत का उपयोग करते हैं। इन रोबोटों को अन्य रोबोटों से अलग करने वाली बात इनकी विशिष्ट समन्वय प्रणाली है...और पढ़ें -
रोबोट: सही रोबोट का चुनाव कैसे करें
विभिन्न प्रदर्शन क्षमताओं और कीमतों में उपलब्ध रोबोट, सभी प्रकार के औद्योगिक उत्पादन कार्यों में सर्वव्यापी होते जा रहे हैं। प्रत्येक रोबोट प्रकार की क्षमताओं को समझना आपके व्यवसाय के लिए सर्वोत्तम विकल्प चुनने की कुंजी है। आधी सदी से, बड़े, छह-अक्षीय रोबोट की छवि बनी हुई है...और पढ़ें -

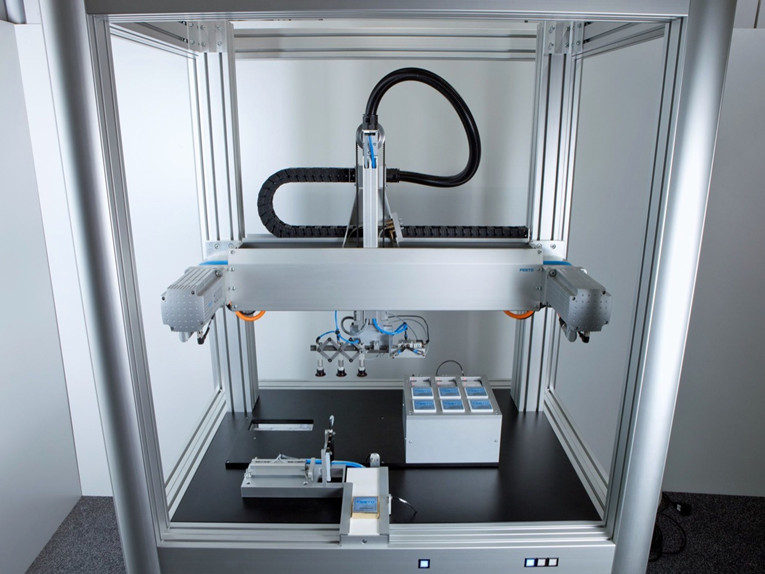
कार्टेशियन रोबोट क्या है?
एक अन्य प्रकार के रोबोट या बहु-अक्षीय प्रणाली के विपरीत। सबसे पहले, एक कार्टेशियन प्रणाली वह है जो कार्टेशियन निर्देशांकों के अनुसार तीन लंबवत अक्षों - X, Y और Z - में गति करती है। (हालांकि यह ध्यान दिया जाना चाहिए कि एक घूर्णी अक्ष - एंड इफेक्टर या आर्म टूलिंग के अंत के रूप में - कभी-कभी...)और पढ़ें -
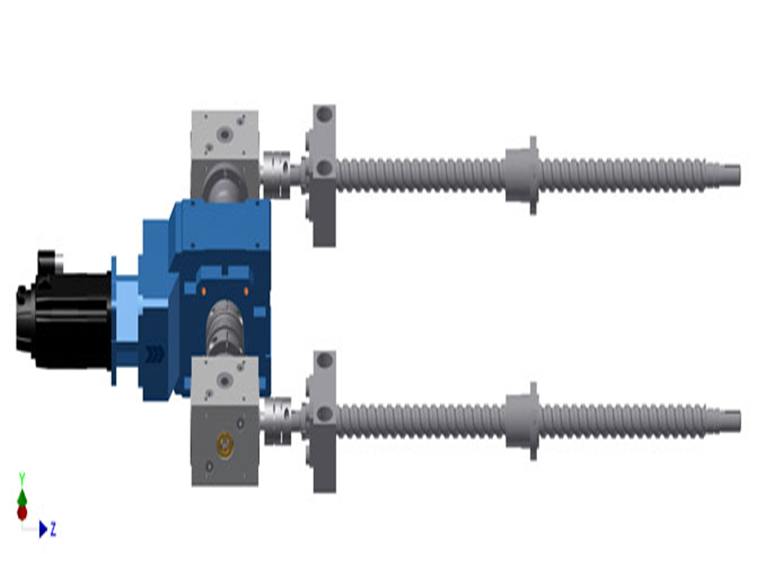
एक से अधिक भारों को स्वतंत्र रूप से स्थानांतरित करने के लिए रैखिक गति के कुछ विकल्प क्या हैं?
यांत्रिक दृष्टिकोण से, रैखिक गति में सबसे चुनौतीपूर्ण अनुप्रयोगों में से एक पारंपरिक रूप से दो या दो से अधिक भारों को स्वतंत्र रूप से स्थानांतरित करना रहा है, जैसा कि कुछ हैंडलिंग, परिवहन और निरीक्षण अनुप्रयोगों में आवश्यक होता है। हालांकि कई रैखिक प्रणालियों, या पूर्व-संयोजित एक्चुएटर्स का उपयोग करना एक आसान प्रक्रिया है...और पढ़ें -
भाग 2 – गैन्ट्री सिस्टम में रैकिंग क्या है, और इससे कैसे बचा जा सकता है?
इस पोस्ट के भाग 1 में, हमने गैन्ट्री सिस्टम में X अक्ष को चलाने के विभिन्न तरीकों और इस बात पर चर्चा की कि चलाने का तरीका गैन्ट्री में रैकिंग की प्रवृत्ति को कैसे प्रभावित कर सकता है। गैन्ट्री सिस्टम में रैकिंग का एक अन्य कारण माउंटिंग की सटीकता की कमी और दोनों X अक्षों के बीच समानांतरता की कमी है...और पढ़ें -
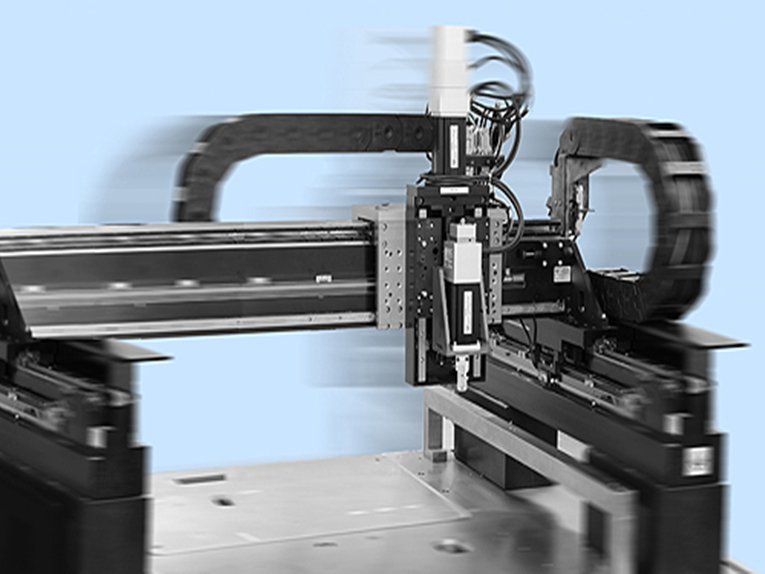
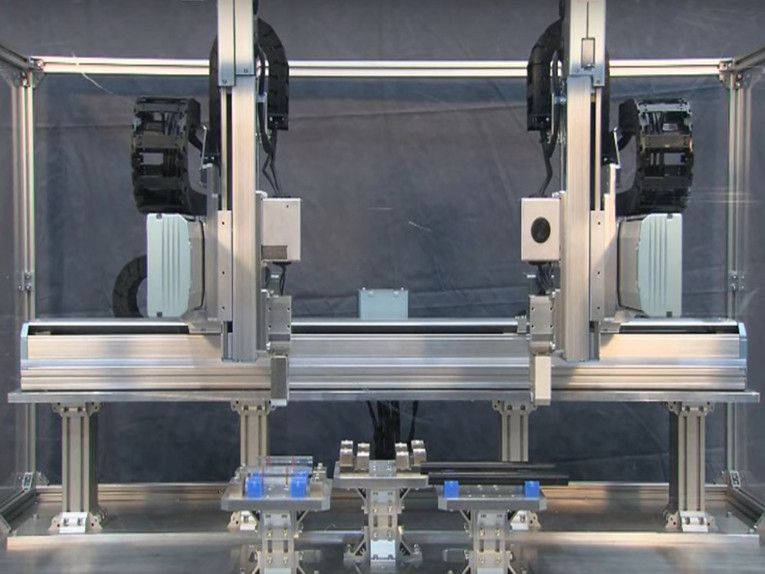
भाग 1 – गैन्ट्री सिस्टम में रैकिंग क्या है, और इससे कैसे बचा जा सकता है?
गैन्ट्री सिस्टम अन्य प्रकार के मल्टी-एक्सिस सिस्टम (जैसे कार्टेशियन रोबोट और XY टेबल) से इस मायने में भिन्न होते हैं कि इनमें दो आधार (X) अक्ष समानांतर रूप से लगे होते हैं, और एक लंबवत (Y) अक्ष इन्हें जोड़ता है। यह दोहरी X-अक्ष व्यवस्था एक विस्तृत, स्थिर आधार प्रदान करती है और गैन्ट्री सिस्टम को उच्च प्रदर्शन देने में सक्षम बनाती है...और पढ़ें -
लीनियर स्टेज अन्य प्रकार के लीनियर मोशन सिस्टम से किस प्रकार भिन्न है?
लीनियर मोशन सिस्टम — जिसमें एक बेस या हाउसिंग, एक गाइड सिस्टम और एक ड्राइविंग मैकेनिज्म शामिल होते हैं — लगभग किसी भी एप्लीकेशन के लिए उपयुक्त विभिन्न डिज़ाइनों और कॉन्फ़िगरेशन में उपलब्ध हैं। और क्योंकि इनके डिज़ाइन इतने विविध होते हैं, इसलिए इन्हें अक्सर प्रमुख निर्माण और संचालन के अनुसार वर्गीकृत किया जाता है...और पढ़ें -
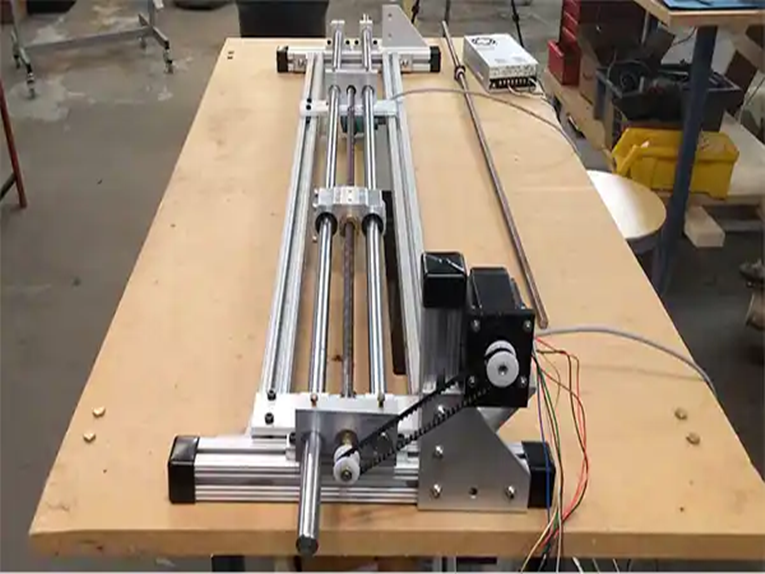
खूबियां और कमियां: बेल्ट ड्राइव बनाम बॉल स्क्रू एक्चुएटर्स
अतीत में यांत्रिक स्वचालन प्रणालियों के लिए चुनौती विद्युत या यांत्रिक मोटरों से उत्पन्न घूर्णी गति को उपयोगी रैखिक गति में सफलतापूर्वक परिवर्तित करना रही है। इस दिशा में एक महत्वपूर्ण उपलब्धि कन्वेयर बेल्ट प्रणाली का विकास था, जो इसके पहले उपयोगी कार्यान्वयनों में से एक थी...और पढ़ें -

लीनियर ड्राइव सिस्टम: एयरोस्पेस से लेकर मशीन टूलिंग तक सटीक पुर्जों का उत्पादन
परंपरागत रैक और पिनियन ट्विन ड्राइव, स्प्लिट-पिनियन-आधारित डिज़ाइन और रोलर-पिनियन सिस्टम के बीच व्यापक अंतर हैं। एयरोस्पेस से लेकर मशीन टूलिंग, ग्लास कटिंग, चिकित्सा और अन्य क्षेत्रों तक, विनिर्माण प्रक्रियाएं विश्वसनीय गति नियंत्रण पर निर्भर करती हैं। आवश्यक गति और परिशुद्धता प्रदान करना...और पढ़ें
