







-
रेखीय गति प्रणाली का केस स्टडी
उच्च परिशुद्धता Z अक्ष: एक उच्च परिशुद्धता SLA शैली के 3D प्रिंटर के निर्माता को परत रिज़ॉल्यूशन को 10 µm के सटीक स्तर पर बनाए रखने की आवश्यकता थी। निरंतर बल वाले एंटी-बैकलैश नट और लीडस्क्रू की यांत्रिक सटीकता, साथ ही स्मार्ट स्टेप-सर्वो मोटर के उच्च प्रदर्शन ने एक ऐसी प्रणाली को संभव बनाया...और पढ़ें -
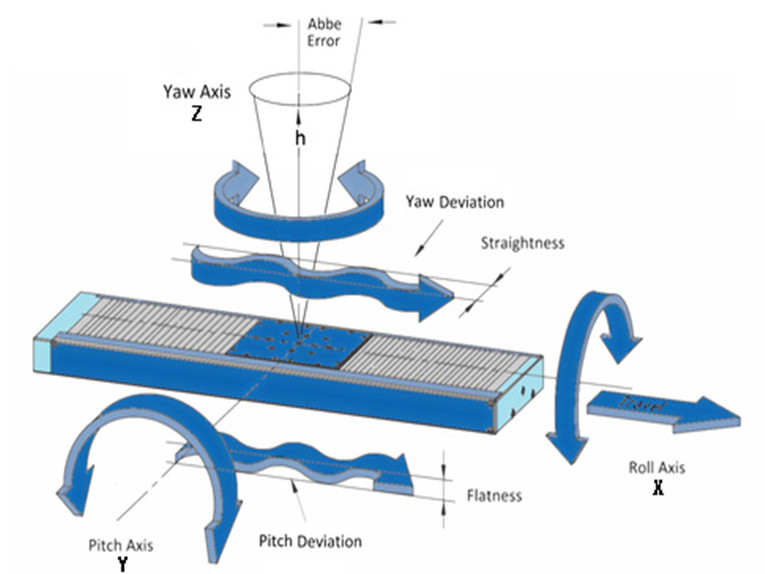
अब्बे त्रुटि क्या है और यह रैखिक गति प्रणालियों को कैसे प्रभावित करती है?
किसी रेखीय गति प्रणाली की सटीकता का मूल्यांकन करते समय, मुख्य ध्यान ड्राइव तंत्र की स्थिति निर्धारण सटीकता और पुनरावृत्ति पर होता है। लेकिन कई कारक हैं जो रेखीय प्रणाली की सटीकता (या अशुद्धि) में योगदान करते हैं, जिनमें रेखीय त्रुटियाँ, कोणीय त्रुटियाँ और अब्बे ई... शामिल हैं।और पढ़ें -

FUYU की 10वीं वर्षगांठ: नई शुरुआत, नया सफर 2011-2021
18 जनवरी, 2022 को, फुयु टेक्नोलॉजी ने अपनी 10वीं वर्षगांठ मनाई। इस अवसर पर, महाप्रबंधक श्री काओ ज़िमिंग ने पिछले 10 वर्षों में फुयु की अपनी रणनीति के बारे में विस्तार से बताया। कंपनी ने "लीनियर मॉड्यूलर मोशन सिस्टम में वैश्विक अग्रणी" बनने का लक्ष्य निर्धारित किया है।और पढ़ें -

गैन्ट्री सिस्टम: लीक से हटकर काम करना
अनुप्रयोग/उद्योग: पैकेजिंग, उत्पादन, पैलेटाइजिंग, पिक एंड प्लेस, स्वचालन। चुनौती: पारंपरिक जोड़ों वाली आर्टिकुलेटिंग आर्म्स के अनियमित कार्यक्षेत्र के कारण मौजूदा कार्यक्षेत्रों को फिर से डिजाइन करने की आवश्यकता हो सकती है। SCARA और आर्टिकुलेटिंग आर्म रोबोट संभवतः रोबोट का सबसे अधिक पहचाना जाने वाला रूप हैं...और पढ़ें -
स्प्लिट ब्रिज सिस्टम क्या है और यह गैन्ट्री से किस प्रकार भिन्न है?
बहु-अक्षीय रैखिक प्रणालियाँ विभिन्न डिज़ाइनों में उपलब्ध हैं, जिनमें कार्टेशियन, गैन्ट्री और XY टेबल कुछ सबसे सामान्य प्रकार हैं। ये डिज़ाइन निर्माण को सरल बनाते हैं और स्थान की बचत भी करते हैं, लेकिन साथ ही इनमें "स्टैकिंग" त्रुटियाँ भी उत्पन्न होती हैं — प्रत्येक अक्ष से त्रुटियों का संचय, जो...और पढ़ें -
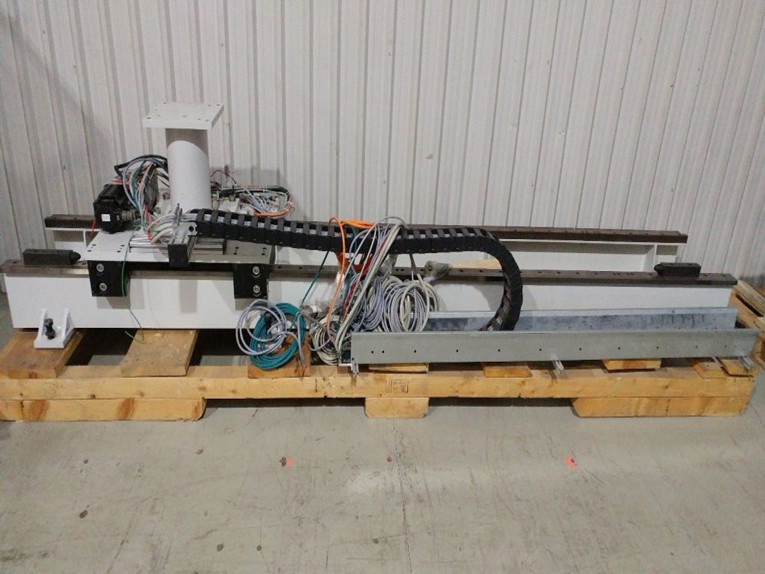
रोबोटिक पोजिशनिंग के लिए लीनियर मोशन ट्रैक डिजाइन करना
रोबोट पोजिशनिंग सिस्टम गोदामों, एयरोस्पेस और ऑटोमोटिव सुविधाओं में लंबी पटरियां होती हैं जो एक रोबोट को कई कार्य करने की अनुमति देती हैं। इन्हें रोबोट-ट्रांसफर यूनिट या आरटीयू या 7वीं-अक्ष प्रणाली भी कहा जाता है। असेंबली, बड़े पैमाने पर वेल्डिंग और वेयरहाउसिंग के लिए ये मोशन डिजाइन तेजी से आम होते जा रहे हैं।और पढ़ें -

रेखीय गति प्रणालियों के लिए अनुप्रयोग आवश्यकताओं को निर्दिष्ट करने के तीन आसान तरीके
किसी भी स्वचालन परियोजना का पहला चरण उद्देश्य को स्पष्ट रूप से परिभाषित करना है - आप कौन सी प्रक्रिया को पूरा करने का प्रयास कर रहे हैं या आप कौन सा आउटपुट उत्पन्न करने का प्रयास कर रहे हैं? एक बार प्रक्रिया या आउटपुट परिभाषित हो जाने के बाद, एप्लिकेशन के विवरण में गहराई से जाने का समय आ जाता है ताकि आप सही घटकों का चयन कर सकें या...और पढ़ें -
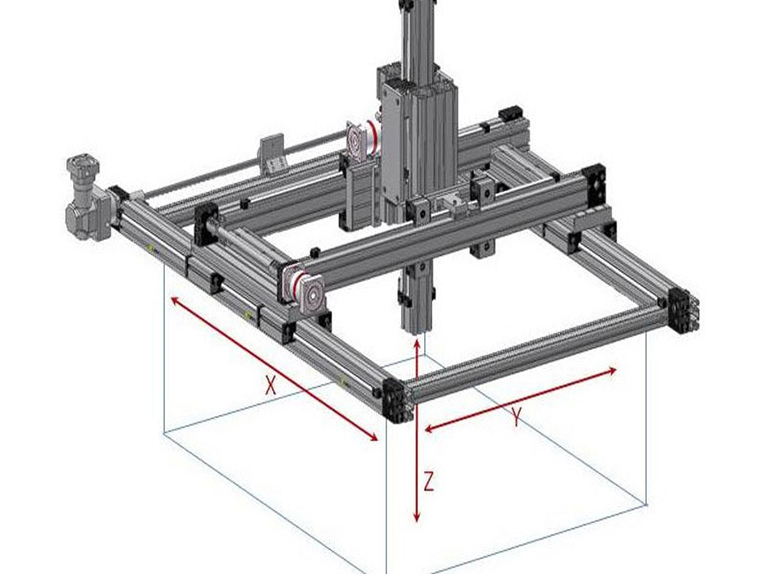
कार्टेशियन रोबोट क्या होते हैं?
कार्टेशियन निर्देशांक ज्यामिति त्रि-आयामी अंतरिक्ष को एक सरल, आसानी से समझ में आने वाली संख्यात्मक प्रणाली में मैप करने की एक उत्कृष्ट विधि है। त्रि-आयामी अंतरिक्ष के लिए कार्टेशियन प्रणाली में, तीन निर्देशांक अक्ष होते हैं जो एक दूसरे के लंबवत (लंबवत अक्ष) होते हैं और एक बिंदु पर मिलते हैं...और पढ़ें -

12 वोल्ट का लीनियर एक्चुएटर क्या होता है?
लीनियर एक्चुएटर्स को आमतौर पर उनके ड्राइव मैकेनिज्म – बेल्ट ड्राइव, बॉल या लीड स्क्रू ड्राइव, न्यूमेटिक ड्राइव आदि – के आधार पर वर्गीकृत किया जाता है। लेकिन रॉड स्टाइल इलेक्ट्रिक एक्चुएटर्स को उनके इंटीग्रेटेड मोटर्स के इनपुट वोल्टेज – आमतौर पर 12 या 24 वोल्ट – के आधार पर वर्गीकृत करना असामान्य नहीं है। ये एक्चुएटर्स...और पढ़ें -

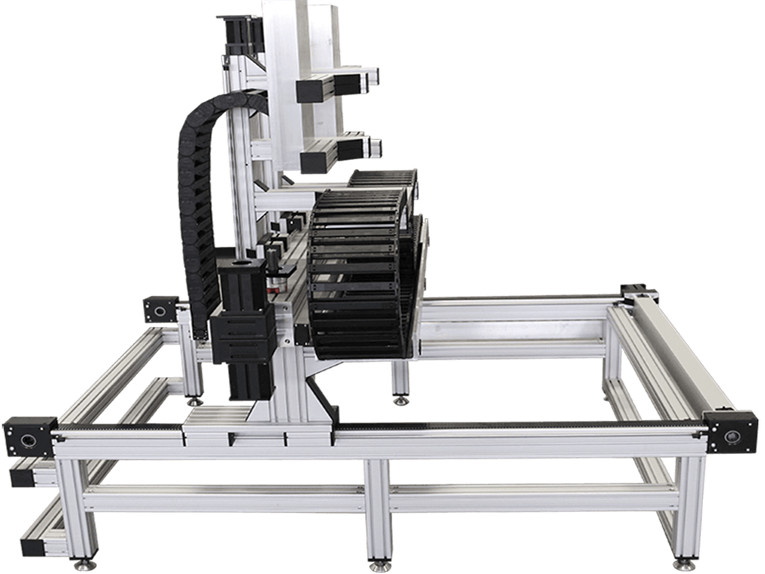
गैन्ट्री सिस्टम: भारी भार और बड़े कार्यक्षेत्रों के लिए एकदम सही समाधान
विनिर्माण उद्योग में स्वचालन की मांग लगातार बढ़ रही है और इसे प्रसंस्करण, संयोजन, निरीक्षण से लेकर पैकेजिंग तक लगभग हर क्षेत्र में लागू किया जा सकता है। पैलेटाइजिंग, सॉर्टिंग आदि जैसे अनुप्रयोगों में स्वचालन प्राप्त करने के लिए गैन्ट्री और 6-एक्सिस औद्योगिक रोबोटों का व्यापक रूप से उपयोग किया जाता है।और पढ़ें -

पिक एंड प्लेस रोबोट के बारे में जानने योग्य बातें
क्या हममें से ज्यादातर लोगों ने बचपन में कभी न कभी ऐसे रोबोट की कामना नहीं की थी जो हमारे खिलौनों को उठाकर वापस उनकी जगह पर रख दे और उन्हें व्यवस्थित कर दे ताकि हमारे माता-पिता हमें गंदगी फैलाने के लिए डांट न दें? आज यह हकीकत बन गया है। हालांकि रोबोट अभी हमारे घरों में सामान उठा-रख नहीं रहे हैं, लेकिन वे ये काम जरूर कर रहे हैं...और पढ़ें -
लीनियर एक्चुएटर्स क्या हैं और उनके अनुप्रयोग क्या हैं?
लीनियर एक्चुएटर एक ऐसा उपकरण है जिसका उपयोग केंद्रीकृत नियंत्रण संकेत की सहायता से वृत्ताकार गति को रैखिक दिशा में नियंत्रित करने के लिए किया जाता है। नियंत्रण संकेत मोटर को किसी भी तंत्र को सीधी रेखा में आगे और पीछे ले जाने में सहायता करता है। खींचने और धकेलने की गति उपकरण को कई कार्य करने में सक्षम बनाती है...और पढ़ें
