







-
Comment obtenir un mouvement linéaire prévisible et fiable
Précision et répétabilité, capacité, course, utilisation, environnement ambiant, synchronisation, orientation, vitesses. Voici quelques conseils pour dimensionner correctement un actionneur linéaire à l'aide du mnémonique ACTUATOR (précision, capacité, course, utilisation, environnement ambiant, etc.).En savoir plus -

Platine linéaire horizontale et verticale, platine de positionnement sur l'axe Z
Les systèmes de positionnement actuels répondent à des exigences de production spécifiques et élevées. En effet, l'intégration personnalisée et les dernières avancées en matière de programmation de mouvement permettent d'atteindre une précision et une synchronisation exceptionnelles. De plus, les progrès réalisés dans le domaine des composants mécaniques et des moteurs aident les équipementiers à anticiper…En savoir plus -
Comment réduire la taille d'un actionneur linéaire
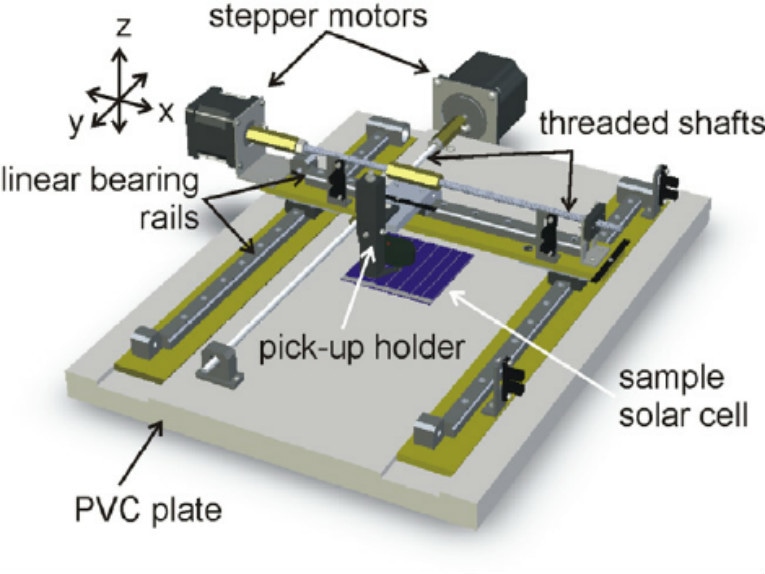
Solution pour les systèmes XY et les petits centres d'usinage, tels que les imprimantes 3D. Les actionneurs linéaires existent dans une large gamme de tailles, mais ces dernières années, les fabricants ont privilégié des formats toujours plus compacts. Cependant, quelle que soit la taille de l'actionneur, l'ajout d'un moteur peut…En savoir plus -
Actualités sur les tendances en matière de mouvement : les étapes de positionnement favorisent une conception pragmatique
Ces dix dernières années, les principales avancées dans le domaine du mouvement ont concerné les systèmes de commande et l'électronique. Les plateformes de positionnement actuelles peuvent répondre à des exigences de sortie spécifiques et élevées. En effet, l'intégration personnalisée et les dernières technologies de programmation de mouvement permettent désormais aux plateformes d'atteindre une précision incroyable.En savoir plus -

Comment choisir la précision d'un guide linéaire
Considérations de montage : bloc unique sur un rail unique, blocs multiples sur un rail unique, roulements multiples sur plusieurs rails. Lors du choix d’un guidage linéaire à recirculation, plusieurs critères doivent être spécifiés, notamment la taille, la précharge et la précision. Et bien que le terme « précision »…En savoir plus -
Tables XY : en quoi diffèrent-elles des systèmes cartésiens et des systèmes à portique ?
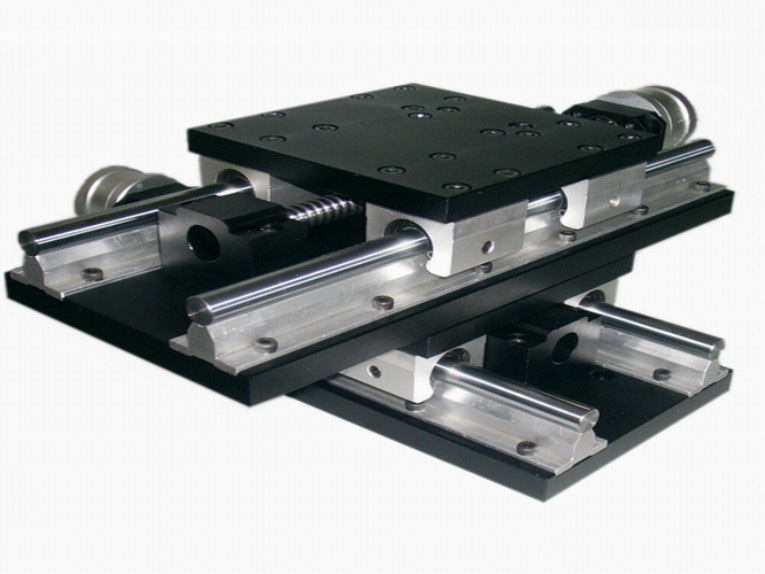
Une table XY classique utilise des glissières à rouleaux croisés et une vis à billes pour une grande précision de déplacement et de positionnement. Il existe de nombreuses façons de concevoir des systèmes linéaires pour le mouvement selon les axes X, Y et/ou Z (également appelés coordonnées cartésiennes). La terminologie généralement employée pour désigner ces systèmes est la suivante :En savoir plus -

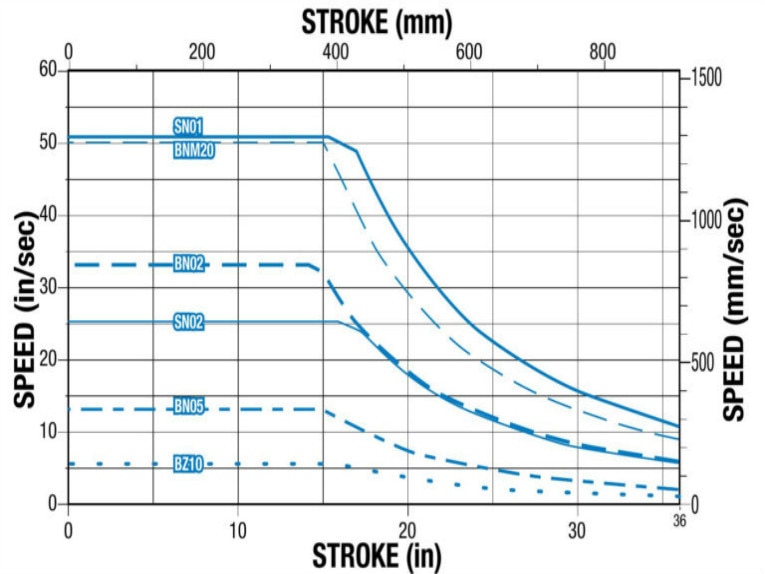
Actionneurs linéaires à grande vitesse : qu’est-ce qui les qualifie de « grande vitesse » ?
La vitesse dépend principalement du mécanisme d'entraînement. À l'instar de nombreux termes utilisés dans le secteur du mouvement linéaire – « robuste », « miniature » et « résistant à la corrosion », pour n'en citer que quelques-uns – il n'existe pas de norme industrielle définissant ce qu'est un actionneur linéaire « haute vitesse ». Néanmoins, il en existe de nombreux…En savoir plus -

Les 5 principales applications de la robotique industrielle
Assemblage, prélèvement et emballage, enlèvement de matière, soudage, peinture. De l'agroalimentaire à la production automobile, les robots industriels sont omniprésents. Hautement automatisées et programmables, ces machines exécutent des tâches répétitives avec une grande précision, fiabilité et productivité.En savoir plus -
Que faire lorsque votre système de mouvement vous réserve une mauvaise surprise
Comparaison des systèmes à anneaux et rails : Les systèmes à anneaux et rails à galets de guidage sont plus compacts et offrent une meilleure précision de positionnement ainsi qu’un plus grand choix de positions de transport de marchandises que les autres systèmes de convoyage pour les applications curvilignes. Dans le cadre de la réduction continue des coûts de production, un…En savoir plus -

Cinq éléments à prendre en compte lors du choix d'un actionneur linéaire
Course, vitesse, précision, montage, maintenance. Vous travaillez sur une application nécessitant un mouvement linéaire – un système d'assemblage de type pick-and-place, une ligne de conditionnement ou un portique de transfert de matériaux – mais concevoir votre propre actionneur, trouver les composants, le monter…En savoir plus -
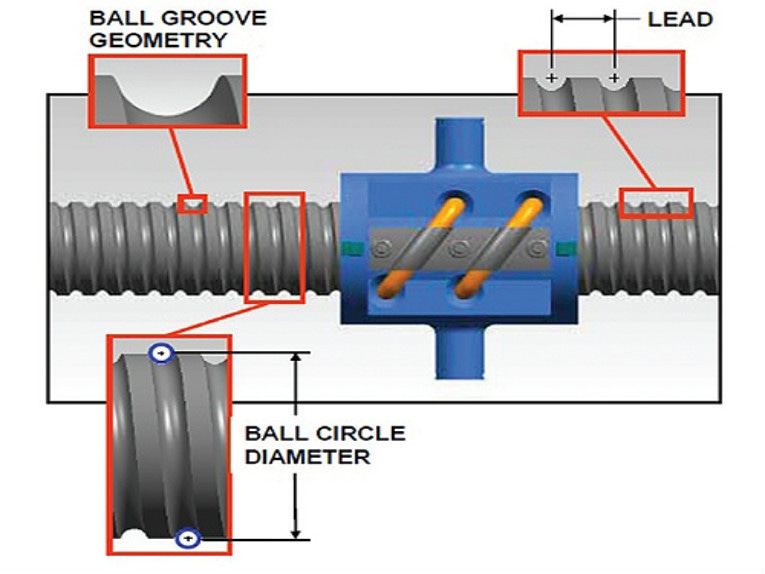
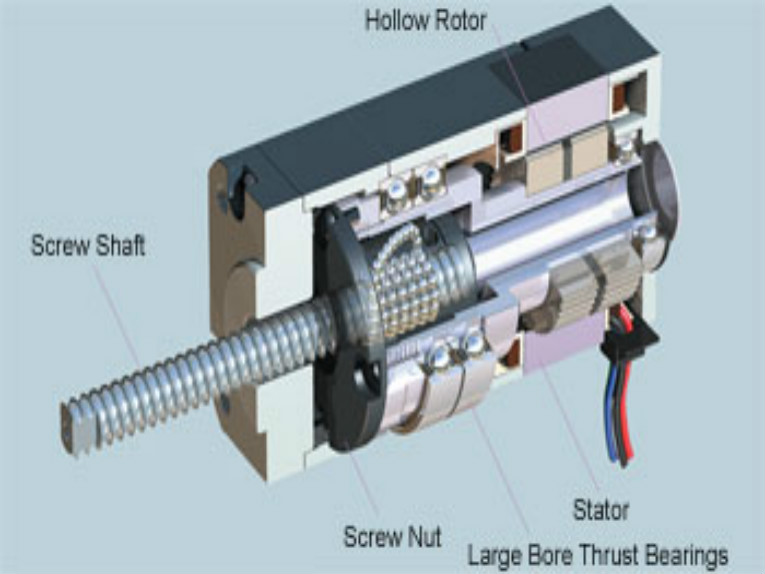
Comment spécifier, sélectionner et appliquer les entraînements à vis à billes linéaires
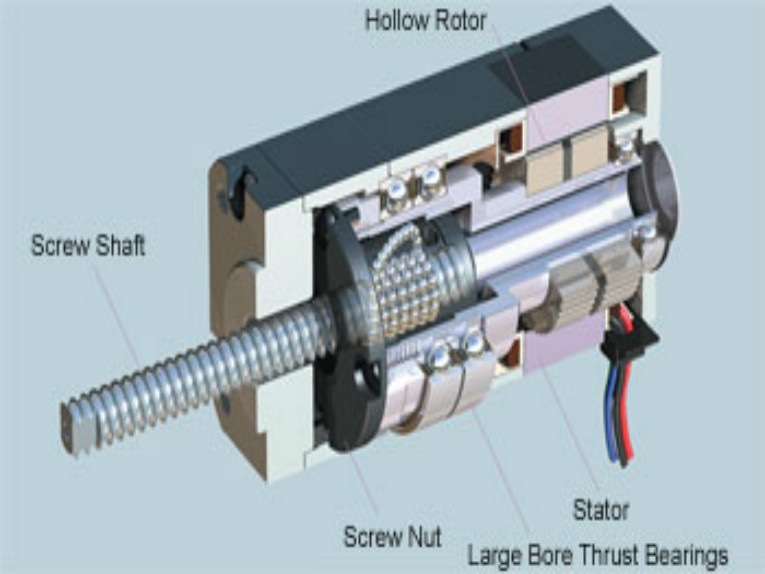
Systèmes de retour de billes, sélection et lubrification des vis à billes. Choisir la vis à billes adaptée à une application donnée garantit la précision, la répétabilité et la durée de vie de la machine, tout en minimisant le coût total de possession. Un entraînement par vis à billes convertit un mouvement de rotation en mouvement linéaire ou vicié…En savoir plus -
Comment estimer vos besoins en actionneurs linéaires avec un minimum de données d'application ?
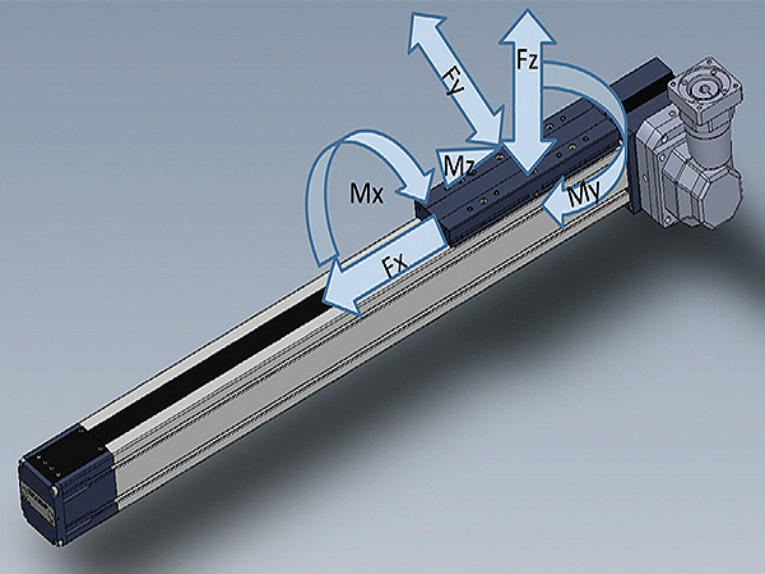
Les charges de moment élevées peuvent imposer l'utilisation d'un actionneur linéaire à double rail. Choisir un actionneur en se basant sur des approximations des performances requises est sans doute plus risqué que de choisir un guidage linéaire ou un entraînement avec un minimum d'informations sur l'application. Cependant, il est assez fréquent que…En savoir plus
