







-

Comment spécifier les poulies pour les transmissions par courroie synchrone
Conception de systèmes d'entraînement par courroie haute vitesse et précision. Lors de la conception d'un système d'entraînement par courroie, la première étape consiste à choisir la courroie la plus adaptée à l'application. Cependant, les poulies jouent également un rôle important dans les performances de la courroie, notamment dans les systèmes d'entraînement par courroie synchrone, où un réglage précis est indispensable.En savoir plus -
Repousser les limites de la précision linéaire
Un mouvement rectiligne et précis est loin d'être facile. Les dispositifs de positionnement linéaire le prouvent en commettant des erreurs non pas dans une, mais dans trois dimensions. Juste au moment où vous pensiez maîtriser le concept de « mouvement linéaire » – atteindre les points requis en ligne droite et…En savoir plus -

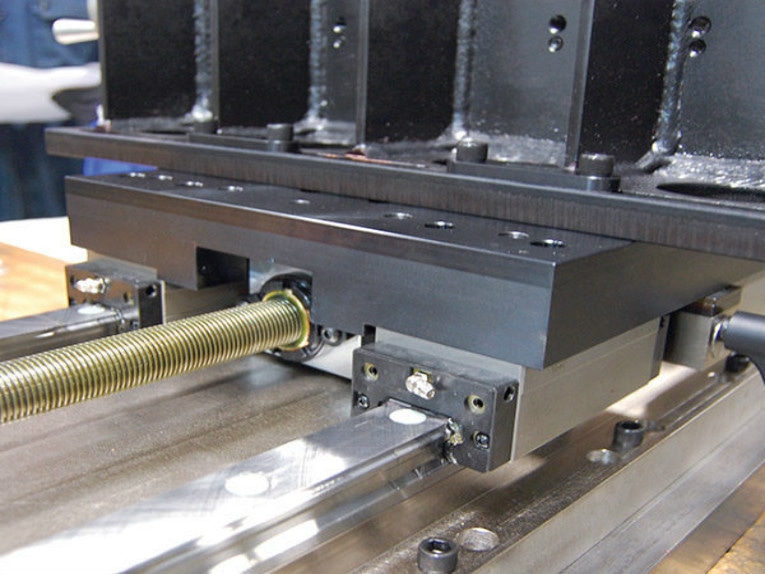
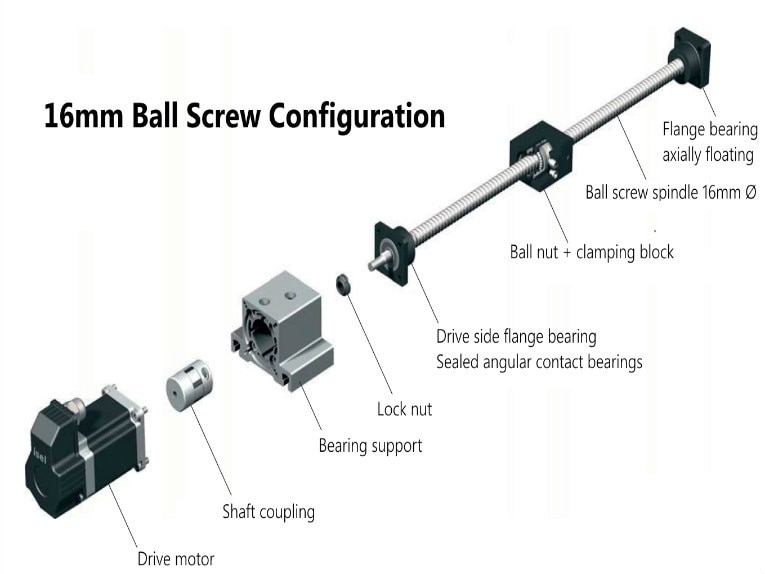
Quelles sont les options disponibles pour les conceptions intégrées de moteurs et de vis ?
Intégration externe moteur-vis, intégration non captive moteur-vis et intégration captive moteur-vis. Les ensembles vis à billes et vis-mère sont souvent entraînés par un moteur en ligne avec l'arbre de la vis via un accouplement. Bien que ce montage soit simple et facile d'entretien, l'ajout…En savoir plus -
Trois considérations de conception importantes pour les robots cartésiens
Configuration système, gestion des câbles, commandes. Si votre application nécessite un robot cartésien, vous disposez d'un large éventail d'options, selon le niveau d'intégration souhaité. Bien que les robots cartésiens pré-conçus soient de plus en plus utilisés par les fabricants…En savoir plus -
Guides linéaires, transmission de puissance, actionneurs : découvrez des applications inattendues
Plus de précision et une installation simplifiée. Notre enquête sectorielle de 2020 révèle une tendance constante à l'automatisation des systèmes auparavant statiques ou à gestion manuelle. La simplicité d'installation, essentielle pour les équipementiers et les utilisateurs finaux de composants linéaires pour axes linéaires, est un atout majeur de ces nouvelles solutions…En savoir plus -
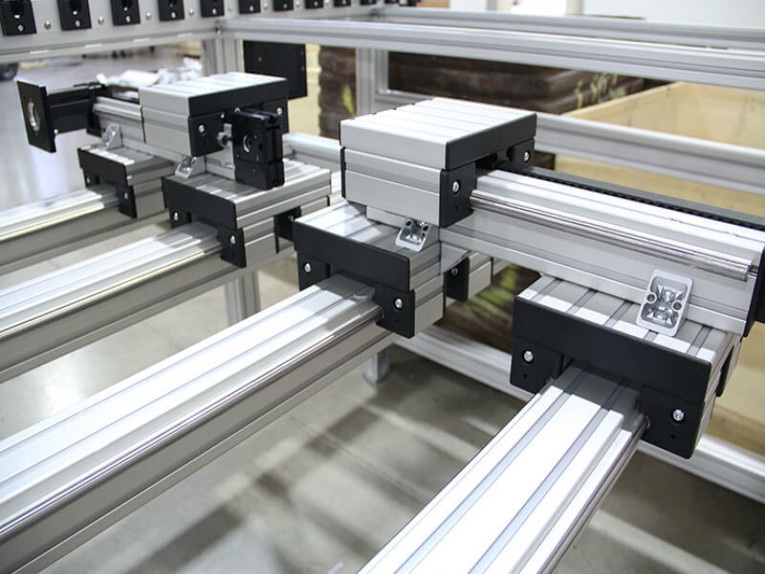
Platines de positionnement linéaire et tables XYZ
Robot cartésien pour applications de prélèvement et de placement. Les platines et tables de positionnement sont utilisées dans les systèmes de commande de mouvement pour maintenir une pièce et/ou la positionner en vue d'une opération. Les platines ou tables, linéaires ou rotatives, constituent le plus souvent des sous-systèmes de mouvement complets. Autrement dit, ce sont des systèmes de mouvement…En savoir plus -
Règles d'alignement des actionneurs et des guides dans les systèmes de mouvement linéaire
Le respect de quelques règles simples de conception des systèmes de mouvement linéaire permet d'améliorer les performances du système et la durée de vie des actionneurs. De nombreuses machines automatisées utilisent des composants de guidage linéaire, tels que des rails profilés, des rails ronds ou d'autres structures à roulement ou à glissement, pour guider et supporter l'élément mobile.En savoir plus -
Moteur linéaire vs. vis à billes
Une application économique pour votre propre conception. Bien que les moteurs linéaires sans fer soient utilisés dans les applications semi-conducteurs et électroniques depuis plus d'une décennie, ils sont encore perçus par de nombreux concepteurs et équipementiers comme des produits de niche. Or, cette perception des moteurs linéaires comme une solution coûteuse pour…En savoir plus -
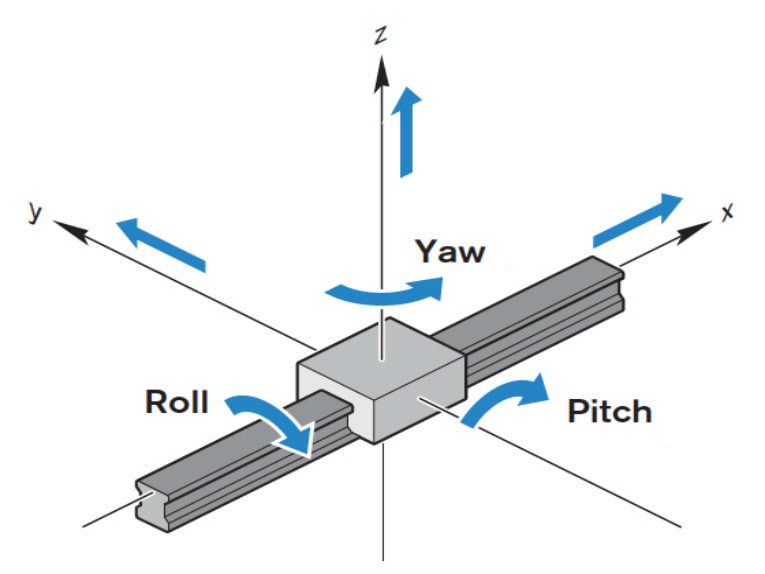
Notions de base du mouvement : Comment définir le roulis, le tangage et le lacet pour les systèmes linéaires
Cela inclut les robots cartésiens, les systèmes portiques et les tables XY. Les guidages et systèmes linéaires sont généralement soumis à des forces linéaires dues aux charges verticales (vers le bas, vers le haut et latérales) et à des forces de rotation dues aux charges en porte-à-faux. Les forces de rotation, également appelées moments de rotation, sont généralement définies comme…En savoir plus -

Tables/plateformes de positionnement linéaire
Dans les systèmes de commande de mouvement, les plateformes et tables de positionnement cartésiennes pour systèmes portiques servent à maintenir une pièce en place et/ou à la positionner pour une opération donnée. Qu'elles soient linéaires ou rotatives, ces plateformes ou tables constituent généralement des sous-systèmes de mouvement complets, c'est-à-dire des systèmes de mouvement à part entière.En savoir plus -
Guide de sélection des systèmes linéaires
Systèmes à courroie, à vis à billes, à crémaillère et pignon, à moteur linéaire, pneumatiques : fini le temps où les concepteurs et constructeurs de machines devaient choisir entre construire leur propre système linéaire de A à Z ou se contenter d’une gamme limitée de systèmes pré-assemblés qui, en général…En savoir plus -
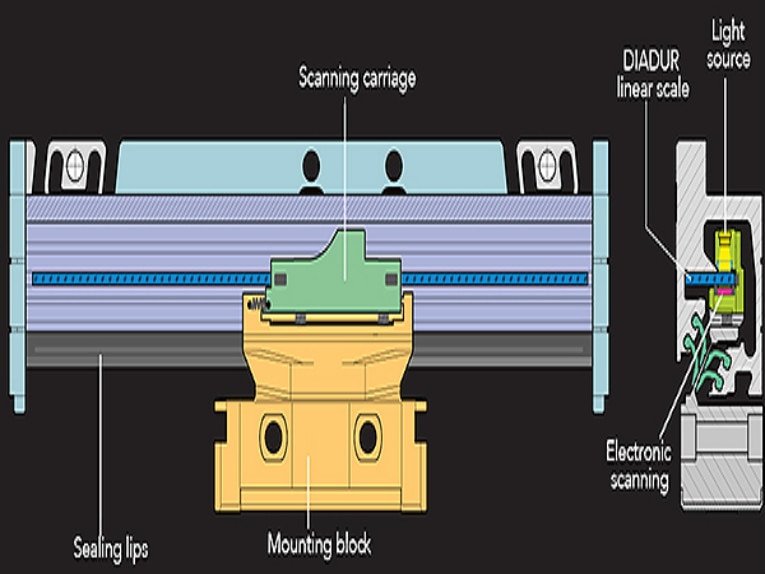
Les codeurs linéaires améliorent la précision
Les codeurs linéaires améliorent la précision en corrigeant les erreurs en aval des liaisons mécaniques. Ils suivent la position de l'axe sans éléments mécaniques intermédiaires. Ces codeurs mesurent même les erreurs de transmission des liaisons mécaniques (telles que les dispositifs mécaniques rotatifs-linéaires), ce qui contribue à limiter…En savoir plus
