







-

1800N työntövoima 0,2 mm:n paikannustarkkuus sähköinen lineaaritoimilaite
Tasavirtamoottori Hiljainen muotoilu, ratkaisee meluongelman putterin käytön aikana. Metallivaihteisto Jauhemetallurgia, puhdasmetallivaihteisto, erittäin korkea lujuus, kaksinkertainen sitkeys. Ylä- ja alarajakytkin Teleskooppivarsi pysähtyy automaattisesti, kun se saavuttaa ylä- tai alarajan varmistaakseen, että...Lue lisää -
5 vinkkiä pinnan esikäsittelylaitteiden terveenä pitämiseen
Tässä on mitä sinun tulee tietää teollisuuskoneiden huollosta, vastuusta ja valinnasta. Ennen toista maailmansotaa koneet olivat yksinkertaisia, kookkaita ja hitaasti käyviä. Koska tuotantovaatimukset olivat alhaiset, koneiden seisokkiajat eivät aiheuttaneet merkittäviä ongelmia. Teknologian kehittyessä...Lue lisää -
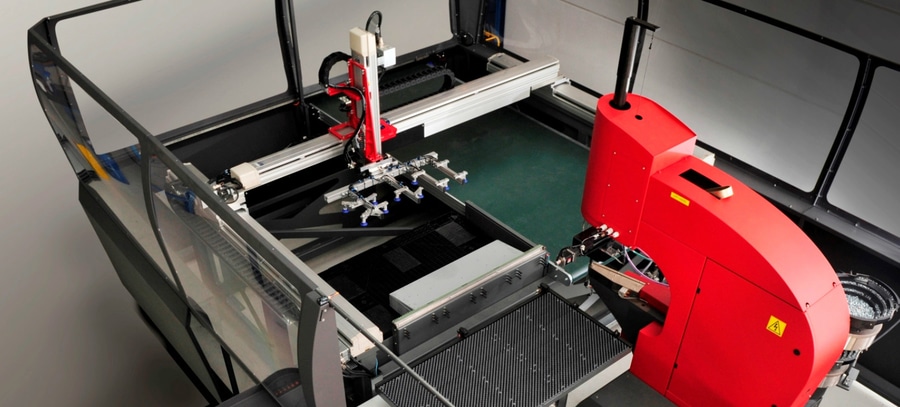
10 etua poiminta-ja-paikkauskoneen käytöstä
Tie tuottavuuden ja tuotelaadun parantamiseen alkaa usein keräily- ja sijoitusautomaatiolla. Keräily- ja sijoituskoneista on tullut olennainen osa modernia valmistusympäristöä, ja ne tarjoavat mukautettavia tapoja ratkaista ongelmia ja lopulta parantaa yritysten tulosta. Tässä ovat ...Lue lisää -
Mikä tekee lineaariohjaimesta sopivan käytettäväksi korkeissa lämpötiloissa?
Metallikomponentit, muovikomponentit, voitelu, valinnaiset komponentit ja lisävarusteet. Useimpien kierrätyspallo- ja rullajohteiden sallittu käyttölämpötila-alue on -10° - 80° C, ja joidenkin kokoonpanojen sallittu lämpötila on lyhytaikaisesti jopa 100° C. Mutta kaikki sovellukset eivät täytä...Lue lisää -
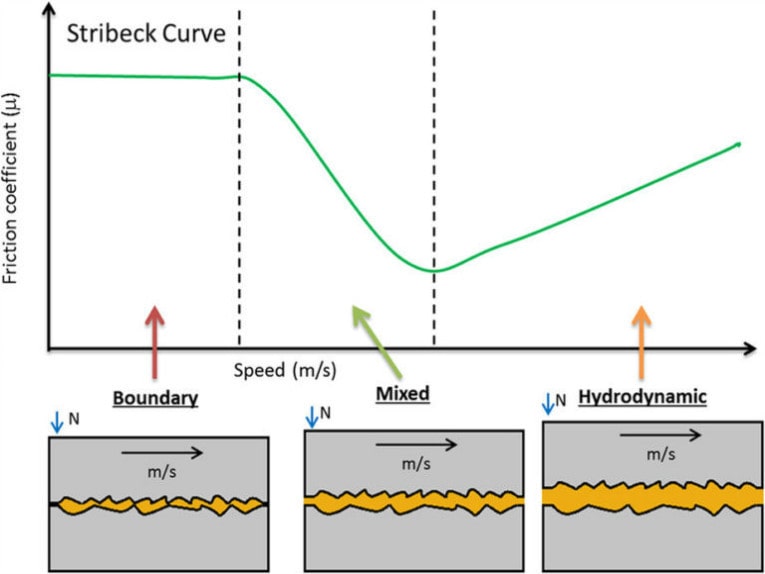
Kuinka vähentää lineaarijohteiden tarttumis- ja liukumisliikkeen vaikutuksia
Mikä aiheuttaa kitkaa? Kuinka sitä voidaan vähentää. Ellet soita viulua, kitka eli tikku-luisto on ei-toivottu ilmiö, joka johtuu kahden pinnan välisen staattisen ja dynaamisen kitkan erosta. Kun lineaarijohteissa esiintyy kitkaa, se voi johtaa tärinään ("nykivään" liikkeeseen), ...Lue lisää -
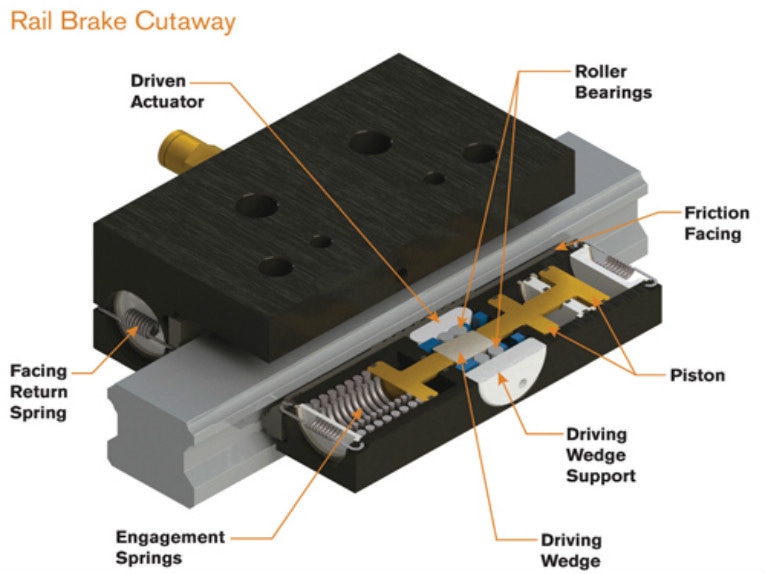
Mitä ovat kiskojarrut ja milloin niitä tulisi käyttää?
Kiskojarrujen valinta ja käyttö Lineaariliikejärjestelmiä käyttävät servo- ja askelmoottorit sisältävät usein jarrutustoiminnon tai askelmoottoreiden tapauksessa pidätysmomentin, joka estää moottoria (ja siten kuormaa) liikkumasta, kun virta on katkaistu. Joissakin sovelluksissa kuitenkin...Lue lisää -

Synkronisten hihnakäyttöjen hihnapyörien määrittely
Nopea ja tarkka hihnakäyttöisen järjestelmän suunnittelu. Hihnakäyttöjärjestelmää suunniteltaessa ensimmäinen vaihe on valita sovellukseen sopivin hihna. Mutta myös hihnapyörillä on tärkeä rooli hihnan suorituskyvyssä – erityisesti synkronisissa hihnakäyttöjärjestelmissä, joissa tarvitaan asianmukaista ...Lue lisää -
Lineaarisen tarkkuuden rajojen koetteleminen
Suora, tarkka liike on kaikkea muuta kuin helppoa. Suora, tarkka liike on kaikkea muuta kuin helppoa, ja lineaariset paikannuslaitteet todistavat sen erehtymällä ei yhdessä, vaan kolmessa ulottuvuudessa. Juuri kun luulit, että "lineaarisen liikkeen" käsite oli selvä – osu vaadittuihin pisteisiin suoralla radalla ja...Lue lisää -

Mitä vaihtoehtoja on integroiduille moottori- ja ruuvirakenteille?
Ulkoinen moottori-ruuvi-integraatio, ei-kiinnittyvä moottori-ruuvi-integraatio ja kiinnitetty moottori-ruuvi-integraatio. Pallo- ja johtoruuvikokoonpanoja käyttää usein moottori, joka on kytketty linjaan ruuvin akseliin kytkimen kautta. Vaikka tämä asennusjärjestely on yksinkertainen ja helppo huoltaa, lisäys ...Lue lisää -
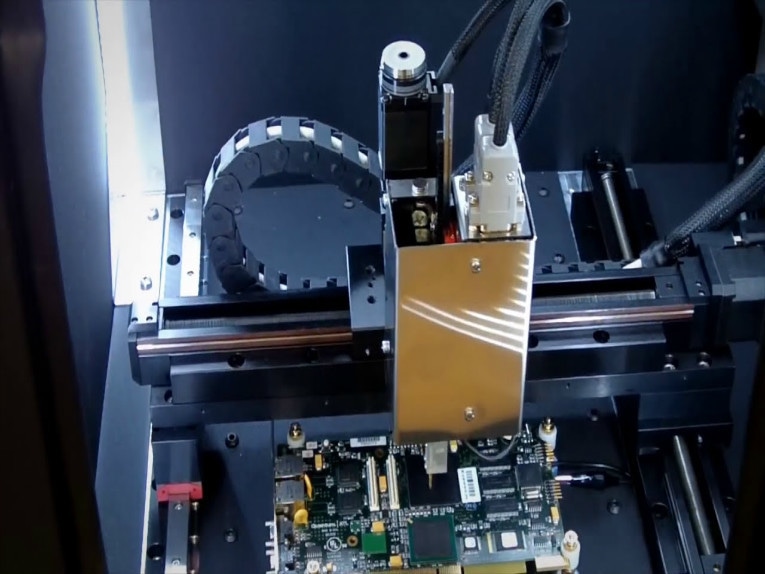
Kolme tärkeää suunnittelunäkökohtaa karteesisille roboteille
Järjestelmän konfigurointi, kaapelien hallinta, ohjaus. Jos sovelluksesi vaatii karteesista robottia, sinulla on laaja valikoima vaihtoehtoja haluamasi integrointitason mukaan. Ja vaikka valmiiksi suunniteltuja karteesisia robotteja käytetään yhä laajemmin valmistajien laajentuessa...Lue lisää -
Lineaarijohteet, voimansiirto, toimilaitteet Näe odottamattomia sovelluksia
Tarkempi ja helpompi asennus. Vuoden 2020 toimialatutkimuksemme osoittaa, että aiemmin staattisten tai manuaalisesti hoidettujen järjestelmien automatisointi on jatkuvaa. Näiden uusien tarjousten avainasemassa on lineaaristen akseleiden lineaarikomponenttien asennuksen helppous sekä OEM-valmistajille että loppukäyttäjille...Lue lisää -
Lineaariset paikannuspöydät ja XYZ-pöydät
Kartesinen robotti poiminta- ja sijoitussovelluksiin. Paikoituspöytiä ja -pyöriä käytetään liikkeenohjausjärjestelmissä työkappaleen pitämiseen paikallaan ja/tai sen asemointiin jotakin toimintoa varten. Pöydät tai pyörivät pöydät, olivatpa ne lineaarisia tai pyöriviä, ovat useimmiten täydellisiä liikkeen alijärjestelmiä. Toisin sanoen ne ovat liikejärjestelmiä...Lue lisää
