







-
Lineaariliikejärjestelmien tapaustutkimus
Erittäin tarkka Z-akseli Erittäin tarkan SLA-tyylisen 3D-tulostimen valmistajan piti pitää kerrosten resoluutiot vaativassa 10 µm:n tasossa. Vakiovoimaisen välyksenestomutterin ja -johtoruuvin mekaaninen tarkkuus yhdistettynä älykkään askelservomoottorin korkeaan suorituskykyyn loi järjestelmän...Lue lisää -
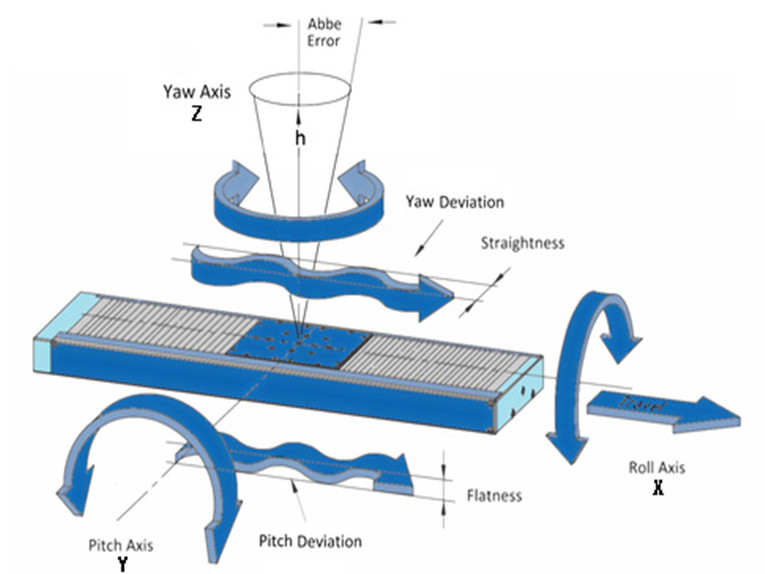
Mikä on Abbén virhe ja miten se vaikuttaa lineaariliikejärjestelmiin?
Lineaarisen liikejärjestelmän tarkkuutta arvioitaessa keskitytään usein käyttömekanismin paikannustarkkuuteen ja toistettavuuteen. Lineaarisen järjestelmän tarkkuuteen (tai epätarkkuuteen) vaikuttaa kuitenkin monia tekijöitä, kuten lineaarivirheet, kulmavirheet ja Abbén...Lue lisää -

FUYUn 10-vuotisjuhla Uusi alku Uusi matka 2011-2021
Fuyu Technology juhli 10-vuotista taivaltaan 18. tammikuuta 2022. Kokouksessa toimitusjohtaja Cao Zhiming kertoi Fuyun omasta strategiasta viimeisten 10 vuoden ajalta. Yhtiö on sopinut tavoitteestaan olla "lineaaristen modulaaristen liikejärjestelmien maailmanlaajuinen johtaja". Minä...Lue lisää -

Gantry Systems: Työskentelyä rajojen ulkopuolella
Sovellus/toimiala: Pakkaus, tuotanto, paletointi, keräily ja sijoittelu, automaatio. Haaste: Perinteisten nivelvarsien epäsäännölliset työalueet saattavat vaatia olemassa olevien työtilojen uudelleensuunnittelua. SCARA ja nivelvarsirobotit saattavat olla tunnistettavin robottimuoto...Lue lisää -
Mikä on jaettu siltajärjestelmä ja miten se eroaa portaalisillasta?
Moniakselisia lineaarijärjestelmiä on saatavilla monenlaisina malleina, joista yleisimpiä ovat karteesiset, gantry- ja XY-pöydät. Vaikka nämä mallit yksinkertaistavat rakennetta ja voivat säästää tilaa, ne aiheuttavat myös "pinoamisvirheitä" – kunkin akselin virheiden kasautumista, mikä johtaa...Lue lisää -
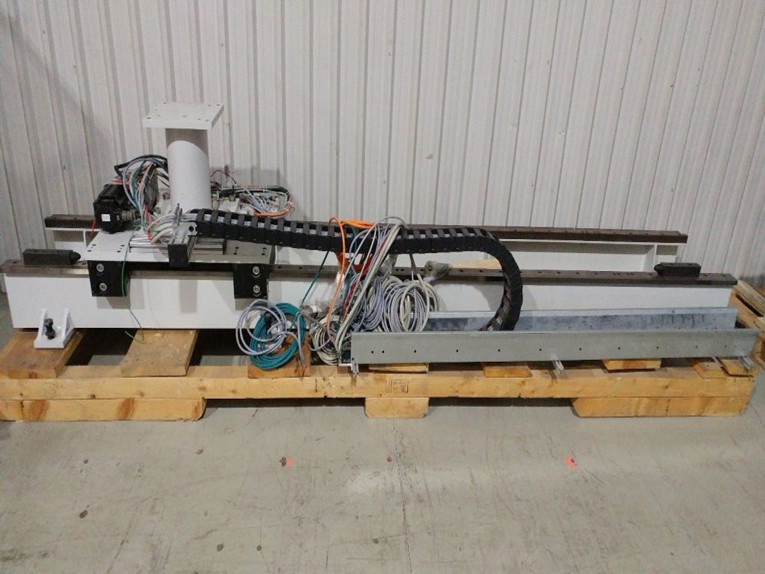
Lineaaristen liikeratojen suunnittelu robottien paikannusta varten
Robottien paikannusjärjestelmät ovat pitkiä ratoja varastoissa, ilmailu- ja autoteollisuudessa, joiden avulla yksi robotti voi suorittaa useita tehtäviä. Näitä liikerakenteita kutsutaan myös robottien siirtoyksiköiksi, RTU:iksi tai 7. akselijärjestelmiksi, ja ne ovat yhä yleisempiä kokoonpanossa, laajamittaisessa hitsauksessa ja varastoinnissa. ...Lue lisää -

Kolme helppoa tapaa määrittää lineaariliikejärjestelmien sovellusvaatimukset
Ensimmäinen askel missä tahansa automaatioprojektissa on määritellä selkeästi tavoite – mitä prosessia yrität saavuttaa tai mitä tuotosta yrität tuottaa? Kun prosessi tai tuotos on määritelty, on aika perehtyä sovelluksen yksityiskohtiin, jotta voit valita oikeat komponentit tai ...Lue lisää -
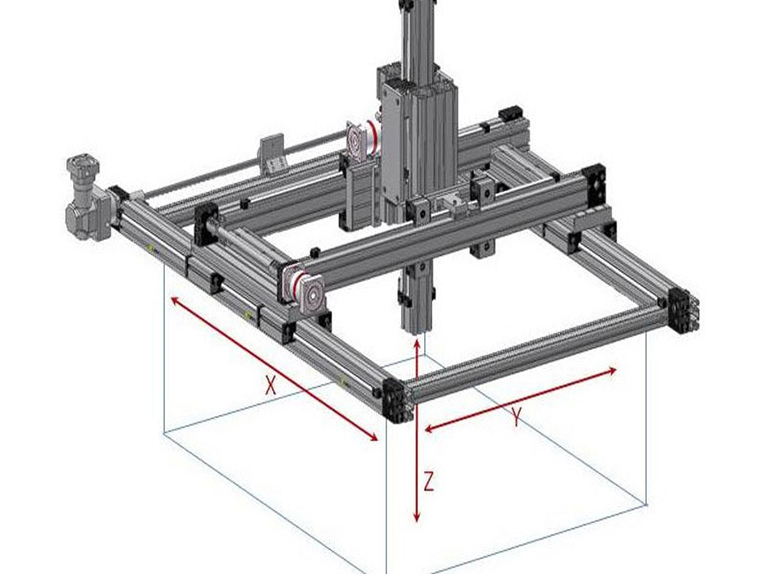
Mitä ovat karteesiset robotit?
Kartesinen koordinaatistogeometria on erinomainen menetelmä kolmiulotteisen avaruuden kartoittamiseen yksinkertaisessa ja helposti ymmärrettävässä numeerisessa järjestelmässä. Kolmiulotteisen avaruuden karteesisessa järjestelmässä on kolme koordinaatistoakselia, jotka ovat kohtisuorassa toisiinsa nähden (ortogonaaliset akselit) ja kohtaavat ...Lue lisää -

Mikä on 12 voltin lineaaritoimilaite?
Lineaaritoimilaitteille on tyypillisesti ominaista niiden käyttömekanismi – hihnakäyttö, kuula- tai johtoruuvikäyttö, pneumaattinen käyttö jne. Mutta ei ole epätavallista, että tankotyyppiset sähköiset toimilaitteet luokitellaan niiden integroitujen moottoreiden tulojännitteen – yleensä 12 tai 24 voltin – mukaan. Nämä toimilaitteet ...Lue lisää -

Gantry-järjestelmät: täydellinen ratkaisu raskaille kuormille ja suuremmille työalueille
Automaation kysyntä valmistusteollisuudessa kasvaa jatkuvasti, ja sitä voidaan soveltaa lähes kaikkiin sovelluksiin prosessoinnista, kokoonpanosta, tarkastuksesta pakkaamiseen. Portaalirakenteita ja 6-akselisia teollisuusrobotteja käytetään laajalti automatisointiin esimerkiksi lavauksessa, lajittelussa,...Lue lisää -

MITÄ TIETÄÄ POIMI- JA SIJOITUSROBOTTEISTA
Eivätkö useimmat meistä ole lapsuudessaan toivoneet robottia, joka pystyisi keräämään lelumme, asettamaan ne takaisin paikoilleen ja järjestelemään ne niin, etteivät vanhempamme nuhtelisi meitä sotkemisesta? Nykyään siitä on tullut totta. Vaikka robotit eivät vielä kerää ja aseta esineitä kodeissamme, ne tekevät...Lue lisää -
Mitä ovat lineaaritoimilaitteet ja niiden sovellukset?
Lineaaritoimilaite on laite, jota käytetään liikuttamaan tai ohjaamaan ympyräliikettä lineaariseen suuntaan keskitetyn ohjaussignaalin avulla. Ohjaussignaali auttaa moottoria liikuttamaan mitä tahansa mekanismia eteen- ja taaksepäin suorassa linjassa. Veto- ja työntöliike mahdollistaa laitteen useiden toimintojen suorittamisen...Lue lisää
