







Ergebnisse 1–12 von 133 werden angezeigt
-

Lineares kartesisches System
FSL120XYZ-H1
-

Vertikales Linearbewegungssystem
FSL120XY-T
-
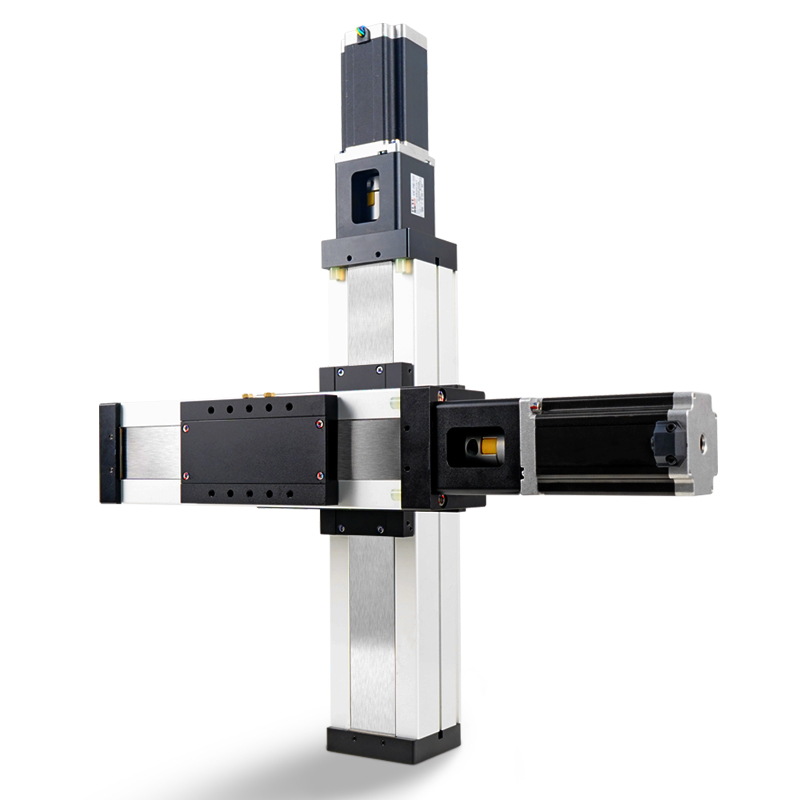
XY-Positionierungssystem
FSL80IS-S
-

Linearantrieb für hohe Lasten
FPB60
-

Mehrachsiges Linearbewegungssystem
FSL120XYZ-X
-

750-W-Servomotor-Linearmodul
FPB80
-

Doppelwellen-Linearantrieb
FPB30
-

Hochgeschwindigkeits-Linearführung
FBL60
-

Kugelgewindetrieb Linearmodul
FSL80
-

Portalsystem
FSL80IS-VM
-

Portalroboter
FSL80IS-L
-

Linearer Portalroboter
FSL80IS-GS