







-
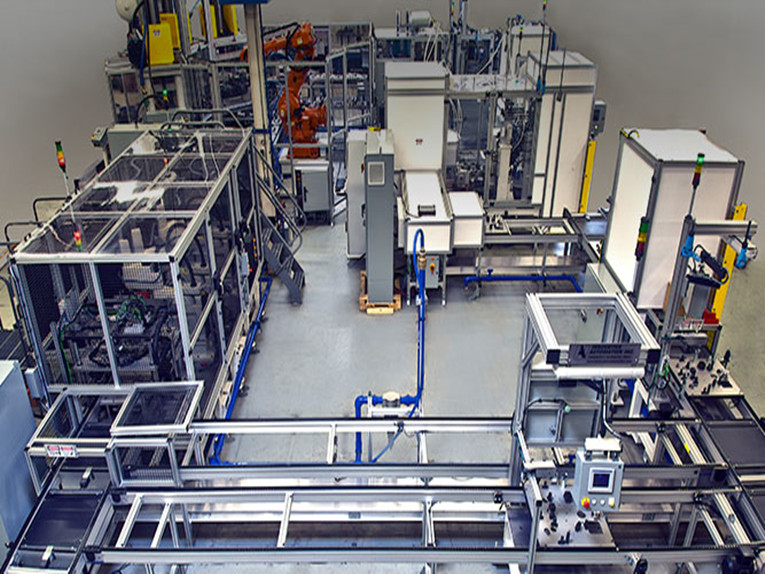
خمس خطوات لدمج المحركات الخطية
التصميم النموذجي لنظام الحركة: تُعد الحركة الخطية أساسية في العديد من الآلات المتحركة، ويمكن لطبيعة الدفع المباشر للمحركات الخطية تبسيط تصميم الآلة بشكل عام في هذه التطبيقات. تشمل المزايا الأخرى تحسين الصلابة، لأن المحركات الخطية مثبتة مباشرة على الحمل.اقرأ المزيد -
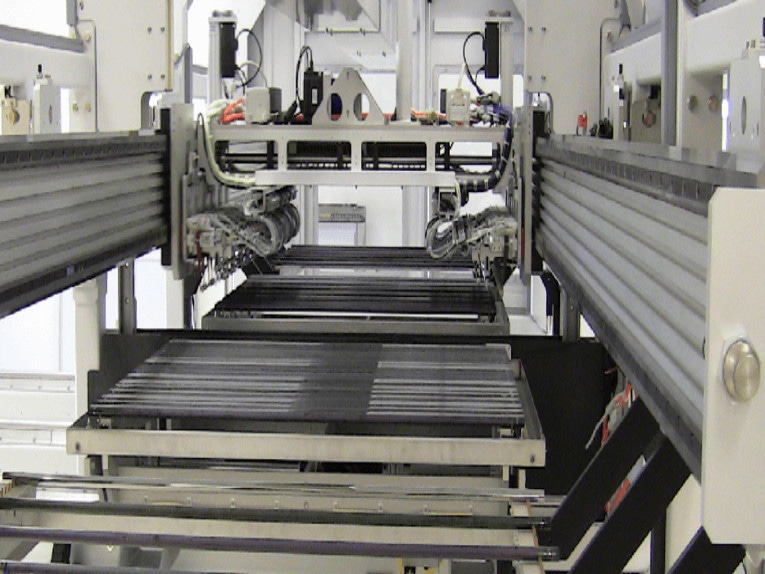
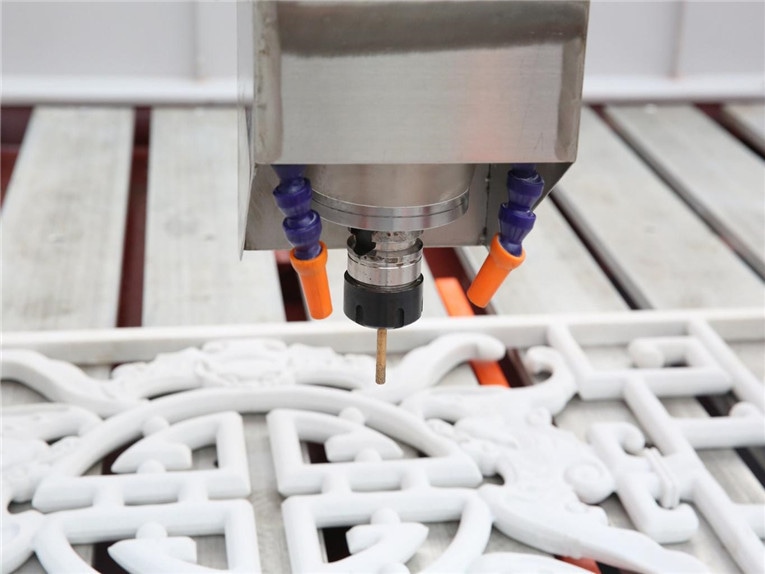
صواني أدوات النقل الخطي الآلية
الحصول على دقة عالية وقابلية تكرار ممتازة من خطوط الإنتاج: حتى وقت قريب، كان الحصول على دقة عالية وقابلية تكرار ممتازة من خطوط الإنتاج أمرًا صعبًا. ولكن الآن، تعمل أنظمة الأتمتة الجديدة على إزالة العوائق المرتبطة بالمعالجة اليدوية وتجميع المنتجات عالية الجودة. هنا...اقرأ المزيد -
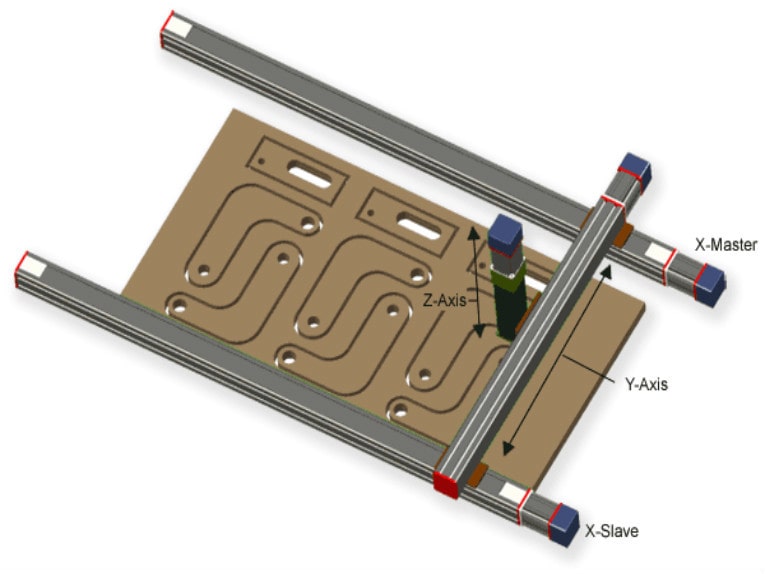
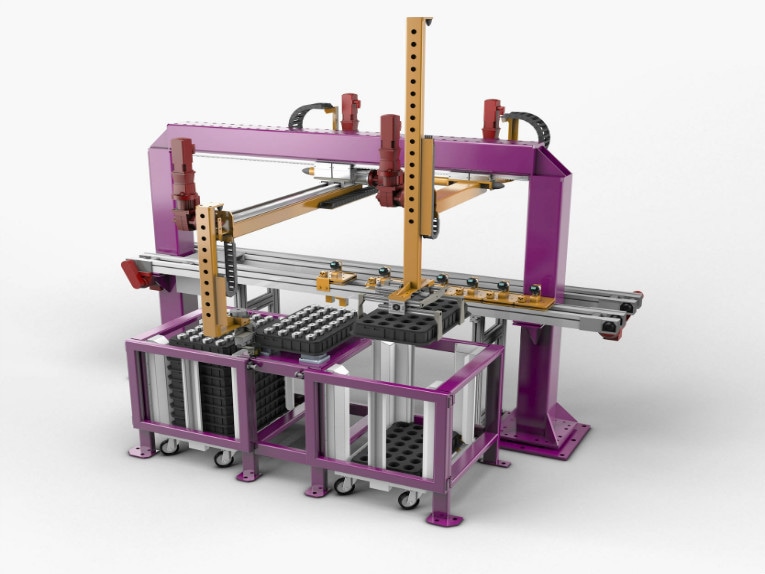
ما المقصود بالرفوف في أنظمة الجسور المتحركة؟
وكيف يمكن تجنب ذلك؟ تختلف الرافعات الجسرية عن أنواع الأنظمة متعددة المحاور الأخرى (مثل الروبوتات الكارتيزية وطاولات XY) باستخدام محورين أساسيين (X) متوازيين، مع محور عمودي (Y) يربط بينهما. يوفر هذا الترتيب المزدوج للمحور X قاعدة واسعة ومستقرة، ويسمح بـ...اقرأ المزيد -
ما الذي يسبب ضوضاء الحزام المتزامنة وكيف يمكن تقليلها؟
يعني التزامن سرعة أكبر وعمرًا أطول. تُستخدم الأحزمة المتزامنة بكثرة في أنظمة الحركة، إذ توفر تشغيلًا أكثر سلاسة وأداءً أفضل عند السرعات العالية مقارنةً بالسلاسل، كما أنها تتجنب مشاكل الانزلاق والتمدد التي قد تُصيب الأحزمة على شكل حرف V في التطبيقات الدقيقة. لكن من عيوب الأحزمة المتزامنة...اقرأ المزيد -

تخلص من عبء إدارة عدم المحاذاة في أنظمة الحركة الخطية
احرص على تجنب أسباب تلف المحامل. لا أحد يرغب في تلف المحمل الخطي قبل الأوان. في حين أن العديد من العوامل قد تهدد العمر الافتراضي للمحمل، يجب على مصممي الآلات الصناعية توخي الحذر بشكل خاص من أخطاء المحاذاة بين قضبان المحمل والعناصر المتحركة. ليس فقط عدم المحاذاة...اقرأ المزيد -

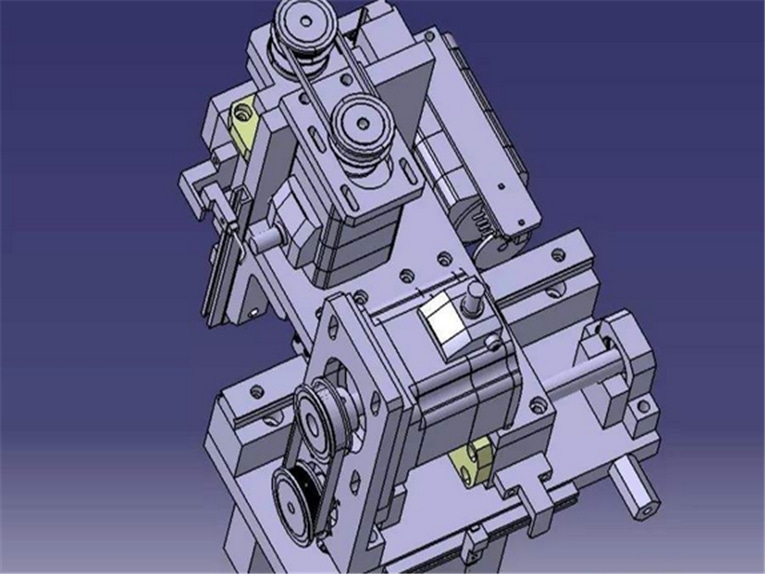
مفاهيم قيادة مختلفة لحركات أدوات الآلات المختلفة
المحركات الرئيسية: تُعدّ المحركات الرئيسية في الغالب محركات كهربائية متزامنة وغير متزامنة، تعمل بنظام تحكم مغلق الحلقة. تشمل تطبيقاتها المحركات المُجمّعة أو المُغلّفة للاستخدام في آلات الخراطة والطحن والتجليخ، بالإضافة إلى مراكز التشغيل. أما محركات المغزل التقليدية ذات المحركات المُغلّفة، فهي...اقرأ المزيد -
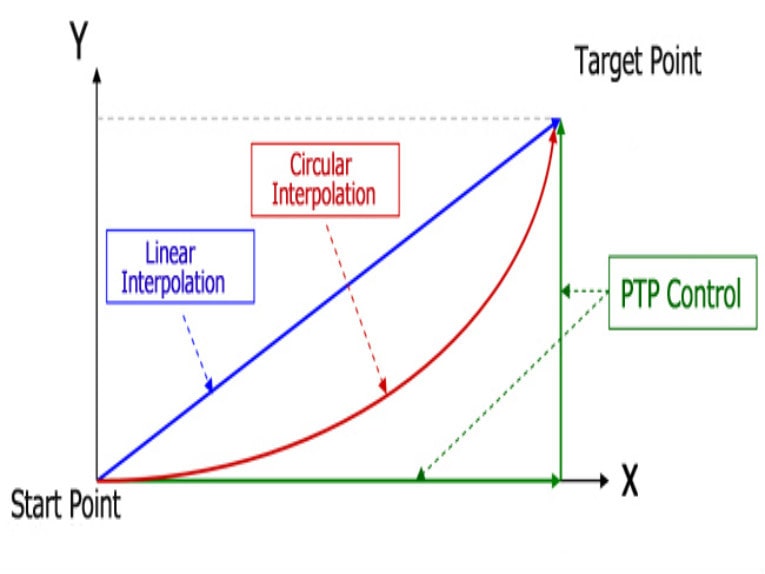
ما أنواع الحركة التي يمكنك إنشاؤها باستخدام الأنظمة الخطية متعددة المحاور؟
الحركة من نقطة إلى نقطة، الحركة المدمجة، الحركة الانسيابية. في العديد من المهام، تتحرك الأنظمة الخطية متعددة المحاور - مثل الروبوتات الكارتيزية، وطاولات XY، وأنظمة البوابات - في خطوط مستقيمة لتحقيق حركات سريعة من نقطة إلى نقطة. لكن بعض التطبيقات، مثل التوزيع والقطع، تتطلب من النظام...اقرأ المزيد -
أنظمة الحركة الخطية: قوتها لا تتجاوز قوة أضعف حلقاتها
استعرض خمس حلقات في سلسلة عناصر التصميم بالغة الأهمية للتشغيل الدقيق. لا يكون نظام الحركة الخطية قويًا إلا بقدر قوة أكثر حلقاته الميكانيكية والكهروميكانيكية ضعفًا. إن فهم كل مكون وميزة (وتأثيره على مخرجات التصميم) يُحسّن...اقرأ المزيد -
ستة أشياء يحتاج المصنعون الصغار إلى معرفتها حول الروبوتات الكارتيزية
الحمولة، الدقة، الشوط، وحدة التحكم، السائق، والمورد. 1. تتعامل مع أحمال أثقل - حمولة 20 كجم ليست مشكلة بالنسبة للروبوت الكارتيزي، مما يوفر المال من خلال تصغير حجم الأجزاء الميكانيكية، واستخدام مكونات أصغر وأنظمة تحكم أقل تعقيدًا. 2. تتكيف مع التوجيهات الصعبة - الروبوت الكارتيزي...اقرأ المزيد -
القيام بالمهام الشاقة: متى تكون الروبوتات الكارتيزية هي الخيار الأمثل
هل يُعدّ الروبوت بحجم "المُدمر" مناسبًا؟ بالمقارنة مع الروبوتات الكارتيزية، يُقدّم نظام SCARA أو النظام سداسي المحاور أداءً أعلى بشكل عام، بتكلفة أعلى ومتطلبات برمجة أكبر، ولكنه يتميز بحجم أصغر ووزن أخف وذراع أقل صلابة. من ناحية أخرى، ...اقرأ المزيد -

ما هي الأنواع الرئيسية للمحركات الخطية؟
المحركات التي تعمل بالحزام/المحركات التي تعمل بالبرغي/المحركات الهوائية/المحركات ذات الترس والجريدة المسننة/المحركات الخطية 【المحركات التي تعمل بالحزام والمحركات التي تعمل بالبرغي】 على الرغم من اختلاف تقنيات المحركات التي تعمل بالحزام والمحركات التي تعمل بالبرغي، إلا أنه من المنطقي وضعها في نفس الفئة لأنها النوعان الأكثر شيوعًا من المحركات الكهروميكانيكية...اقرأ المزيد -

ما الفرق بين الحركة التسلسلية والحركة المتوازية في تصميم الحركة متعددة المحاور؟
نحن نعمل على حل مشكلة تحديد المواقع. تتضمن طاولات ومنصات تحديد المواقع الحديثة أجهزة وبرامج أكثر تخصيصًا من أي وقت مضى لتلبية متطلبات الإخراج المحددة. صُممت هذه الأجهزة والبرامج خصيصًا لتصميمات الحركة التي تتحرك بدقة حتى في أوامر المحاور المتعددة المعقدة. تغذية دقيقة...اقرأ المزيد
